 | |||||||||
|  | ||||||||
| |||||||||
| | ||||||||
| kategória | ||||||||||
|
|
||||||||||
|
|
||
Intelligens Rendszerek
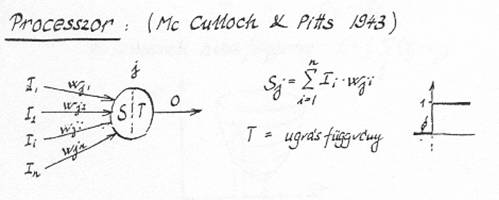
1. Perceptron
Kiegészítés az 1. elõadáshoz, az órai jegyzet alapján:
A perceptron-tanító algoritmus a Delta-szabály alkalmazása
A perceptron hátránya, hogy a lineárisan nem szeparálható függvények (nem határolható el egyértelmûen az igaz érték a hamistól) nem oldhatók meg vele (Pl. XOR)
Láncszabály: az összetett függvények deriválási szabálya (kívülrõl befelé haladva)
Gradiens módszer: a hegymászó módszer ellentéte, vagyis egy lokális minimum keresése
Nettalk: bemenete ASCII karaktersorozat, kimenetei pedig fonémák. Jósága 80% körüli, amely kicsivel jobb, mint a szabály-alapúaké. 40-50 ezer szóval tanították be; a random zaj hozzáadását is jól viseli; ha egy része elromlik, az újratanulás gyorsabb, mintha elölrõl kezdené
Felügyelet nélküli tanítás: önszervezõdés, Hebb szabállyal (ha két neuron aktív -egyetértenek-, a súlytényezõt növeljük, ha csak az egyik, csökkentjük)
Versengéses tanulás: winner takes all (a gyõztes neuronokra esõ értékeket növeljük), ezzel lehet kiszedni egy mintából a lényeget úgy, hogy nem tudjuk, mi a lényeg
2-3. Robotok
A robotok célja
Adekvát reakciók (idõben reagáljon bizonyos eseményekre)
Célszerû viselkedés
BEAM robotok
B -Biology (Biológiai mintára készített)
E -Electronics (elektronikusan mûködtetett)
A -Aesthetics (esztétikusan kivitelezett)
M -Mechanics (mechanikák)
Robot vagy automata?
Mi a különbség automaták és robotok közt?
A véges automata olyan logikai hálózat, amely adott bementre adott kimenetet ad (programozható). Ha több bites a visszacsatolás, többféleképpen tud reagálni.
|
|
Automaták |
Robotok |
|
Programozhatóság |
|
|
|
Érzékelõk |
|
|
|
Írható/olvashat 121h71b ó memória |
|
|
|
Adaptációs képesség |
|
|
|
Tanulási képesség |
|
|
A Robotok felhasználása
Katasztrófaelhárító robotok: tûzoltó, Felderítõ robotok (vegyi vagy sugár szennyezet területen)
Katonai Robotok (Akna felkutató, megsemmisítõ robotok)
Ûrkutatás, ipari felhasználás, stb.
Szenzorok
Alapvetõ feladatuk a környezeti információk fogadása és továbbítása a központi rendszer felé.
Típusai:
o A Passzív szenzorok a környezet fizikai jellemzõit érzékelik (hõmérséklet, nyomás, fény, hang)
o Az Aktív szenzorok mûködésük során maguk bocsátanak ki mérõ jelet, mely visszaverõdését érzékelik. (radarok, fényérzékelõk, lézeres távolságmérõk)
Az Intelligens szenzorok jellemzõi
Önkalibráció
Öndiagnosztika
Dinamikus érzékenység
Programozhatóság, távvezérelhetõség
Részei: jeladó, jelformáló | digitalizáló, mikrokontroller (ehhez a paraméterek EEPROM-ban), illesztõ (port)
Marskutatás
A Mars-Föld távolság 56-378 millió km között változik
A rádiójelek terjedési ideje 6-40 perc
A kommunikáció mikrohullám UHF segítségével történik
Marsjármûvek
Pathfinder
o Tömeg:10.6 kilogramm (23 pounds)
o Tudományos felszerelés: Alfa Proton Röntgen spektrométer, három kamera
A Spirit tudományos felszerelése:
o Kamerák (Panoráma kamera, Mikroszkóp)
o Spektrométerek (Termo emissziós spektrométer(Mini-TES), Mössbauerspektrométer(MB), Alfa részecske röntgen spektrométer(APXS))
o Örlõkészülék, Mágnesek
Opportunity
Navigáció
A navigáció feladata, hogy a robot egy kijelölt célpozícióba jusson. A mozgás során több szempontot is figyelembe kell venni:
A robot mozgási lehetõségei
A mozgásra fordított energiaszükséglet
Idõ
Robot mechanikai tulajdonságai
Terepviszonyok
A navigáció módjai
Elõre ismert terepen
o Matematikai módszerekkel a legrövidebb utat találhatjuk meg
o Vagy kereshetjük a legbiztonságosabb utat (távol az akadályoktól)
Ismeretlen terepen (szenzorokkal): csak a közvetlen környezetérõl szerez információkat, ezért jósága függ a szenzorok hatótávolságától. Amerre járt, azt megjegyezheti.
Szabályrendszer: Fontos az emlékezõképesség (elég csak az utolsó lépésre), különben beragad a robot egy zsákutcába
Akadályelkerülés és pályatervezés
szabályalapú algoritmus: egy esetleíró táblázat segítségével definiálhatjuk az egyes elõállt helyzetekhez tartozó cselekvést.
módosított szabályalapú algoritmus
neurális-elvû algoritmus
tapasztalatszerzésen alapuló algoritmus
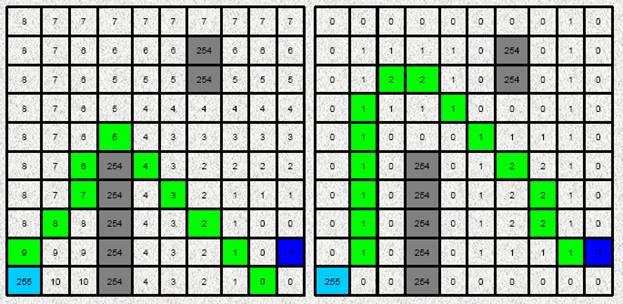
hullám-továbbterjesztéses algoritmus
módosított hullám-továbbterjesztéses algoritmus
GVD-elvû, gráfbejárásonalapuló algoritmus
A hullám és a GVD algoritmusok potenciálmezõs megvalósítása
A hullámos megoldással egy monoton növekvõ sorozatot, és a legrövidebb utat kapjuk
A GVD algoritmussal pedig egy monoton csökkenõ sorozatot és a legbiztonságosabb utat
Azonos számok esetén meg kell adni egy preferenciát, amelyet tanulással kísérletezhetünk ki:
o Egy esethez hozzárendeljük az összes lehetséges elmozdulást, majd ezekhez fitness-értékeket
o Rendelkezik egy genetikai alaptudással, amit örökölt (megadtuk neki)
o Elõször a legmagasabb jóságú cselekvést hajtja végre
o Ha az eredmény megfelelõ, növeljük az értéket (a tudás tárolása)
o Az egyenértékû cselekvésekbõl lehet véletlenszerûen generálni, akár rosszabb értékûek bevételével is (rulett-kerék)
4. Genetikus algoritmusok
Biológiai inspiráció
A genetikus programozás alapját Darwin evolúciós elmélete adja.
Fennáll egy populáció valahány egyeddel. Az egyedek egy része szaporodik, valahány utód tovább él, a többi pedig elpusztul. Az egyedek a generációk alatt átalakulnak, jó esetben fejlõdnek.
Ha jól szabályozott a rendszer, akkor az újonnan létrejött populáció hosszú távon átlagosan jobb "minõségû" egyedeket fog tartalmazni, és létrejöhet olyan egyed, ami valamilyen szempontból ideális.
Amikor a kritériumfüggvény felületének lokális minimumai vannak, önmagában a gradiens módszerek nem alkalmazhatóak, mert "beragadnak" egy lokális minimumba
Zaj bevezetése lehetõvé teszi a lokális minimumokból való kiszabadulást.
Az evolúciós algoritmusokat sztochasztikus szélsõérték-keresésnek nevezzük. Ezek biológiai analógiákra épülnek.
Az evolúciós algoritmusok négy fõ csoportja:
A genetikus algoritmusokat akkor célszerû alkalmazni, ha
Az algoritmus mechanizmusai
o Mutáció nélkül a rendszer gyorsan leáll (a kombinációk száma véges)
o Alacsony mutáció esetében lassan jutunk eredményre.
o Magas mutáció esetében a rendszer "szétesik", nem ad eredményt.
o stratégiai paraméterek választása (induló egyedek (individuumok) száma, szelekciós eljárás kiválasztása stb.)
o a populáció kezdõértékeinek megadása
o az individuumok értékelése (fitnessszámolás)
o generációs ciklus:
Ø szülõk választása, utódok generálása mûveletekkel
Ø utódok értékelése (fitness-számítás)
Ø új populáció kiválasztása (különbözõ stratégiákkal)
Ø megállási feltétel (általában adott számú ismétlés, azaz generáció szám után, vagy adott jóság
Ø elérése után)
o eredmények közlése
Szelekciós eljárások
Fitness arányos szelekció rulett kerék mintavételezéssel: minden egyednek kijelölünk egy szeletet a rulettkerékbõl úgy, hogy a szelet mérete arányos legyen az egyed fitness értékével. A kereket megpörgetjük, és az az egyed lesz kiválasztva, amelyik felett megáll. A gond ezzel az eljárással, hogy ha az egyedek fitness értékei között nincs nagy különbség a populáción belül, akkor minden egyed közel azonos eséllyel lehet szülõnek választva.
Rang szerinti szelekció: A sorrend szerinti szelekció, éppúgy, mint a fitness arányos szelekció, a rulettkerékalapján választja ki az egyedeket. Itt a rulettkerék szelete egy egyednek a sorba rendezett populációban betöltött helye szerint határozódik meg. Így a leggyengébb egyed kap egy egységnyit, míg a legjobb ne gységnyit, ahol n a populáció nagysága.
Verseny szelekció: A verseny szelekcióhoz hasonlóan a szelekciós nyomást tekintve, de sokkal hatékonyabban számítható. Két egyedet kiválasztunk véletlenszerûen a populációból. Egy véletlen számot generálunk 0 és 1 között. Ha r < k (ahol kegy paraméter, például 0,75), akkor a jobb egyedet választjuk. Egyébként a gyengébb egyed kerül kiválasztásra.
Legjobb szelekció: Ennél az eljárásnál egyszerûen a populáció legjobb egyedét választjuk.
Véletlen szelekció: Ennél az eljárásnál véletlenszerûen választunk ki egy egyedet.
Interaktív szelekció: például grafikai elemeket lehet kifejleszteni, ahol az alkalmas fitness-függvényt nem tudjuk megalkotni. A program felhasználója tud választani az egyedek közül.
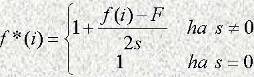 Szigma scaling: Itt a rulettkerék szelete az egyed fitness értékének, a
populáció átlagának és szórásának függvényében rendelõdik az egyedekhez. A
módosított fitness értékeket az alábbiak szerint számítjuk ki:
Szigma scaling: Itt a rulettkerék szelete az egyed fitness értékének, a
populáció átlagának és szórásának függvényében rendelõdik az egyedekhez. A
módosított fitness értékeket az alábbiak szerint számítjuk ki:
Ahol f*(i) az i egyed módosított fitness értéke, f(i) az i egyedhez tartozó eredeti fitness érték, F a populáció átlag fitness-értéke és s a populáció fitness értékeinek a szórása. (áttoljuk egy szûrõn az értékeket)
Boltzmann-szelekció: A szigma scaling a "szelekciós nyomást" a folyamat alatt egy konstans érték körül tartja. Néha szükségünk lehet rá, hogy a szelekció jobban kihangsúlyozza a magasabb fitnessétékû egyedeket.
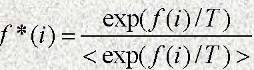 Ahol f*(i) az i egyed módosított fitnessértéke, f(i) az i egyedhez
tartozó eredeti fitnessérték, a <.> az aktuális populáció középértékét
jelöli és T egy hõmérséklet, mely egyenletesen csökken a folyamat során.
Alacsonyabb T értékek mellett nõ a különbség az f*(i)-ben az alacsony és magas
fitness-értékek között.
Ahol f*(i) az i egyed módosított fitnessértéke, f(i) az i egyedhez
tartozó eredeti fitnessérték, a <.> az aktuális populáció középértékét
jelöli és T egy hõmérséklet, mely egyenletesen csökken a folyamat során.
Alacsonyabb T értékek mellett nõ a különbség az f*(i)-ben az alacsony és magas
fitness-értékek között.

5-6. GPS
A helymeghatározás célja
Térképezés
o pontosabb, részletesebb térképek készítése,
o a hagyományos térképek pontosítása
földmérés
navigáció (hajózás, repülés, túrázás, gépkocsi)
A GPS rendszer célja
A helymeghatározás
o Gyorsítása, pontosítása, egyszerûsítése
o idõjárási viszonyoktól függetlenné tétele
eredetileg katonai célra
A helymeghatározás hagyományos módszerei: iránytû, szextáns (speciális szögmérõ), térkép, óra, világítótorony (egy piros körbeforog, s amikor északra mutat, egy fehér felvillan).
Új módszerek: VOR, DME (rádiófrekvenciás), ILS (leszálláshoz: egy kereszt középen a pilótának)
GPS mûholdak
Név: Navstar, Gyártó: Rockwell Int., Távolság: 20.000km, súly: 862kg, keringési idõ: 12 óra, tervezett élettartam: 7,5 év
Földi állomások: Nyomon követik a GPS mûholdakat, vizsgálják a mûködõképességüket és pontos pozíciójukat. A fõ földi állomás felküldi a mûholdra a pályaadat-korrekciókat, valamint az óra összeadó-állandóját. A mûhold beépíti a GPS vevõk felé sugárzott jelekbe ezeket az adatmódosításokat.
Az Öt földi követõ állomás helye: Hawaii, Ascension Island, Diego Garcia, Kwajalein, Colorado Springs
A Holdak azonosítása egy pszedu-random jel segítségével van megoldva
A GPS mérés alapja
A GPS alapja a mûholdas háromszögelés:
Geometriai alapok
Tegyük fel, hogy egy olyan mûholdtól mérjük távolságunkat, mely 20.000 km-re van
Biztosak lehetünk, hogy valahol egy olyan gömbön helyezkedünk el, amely sugara 20.000km és középpontja a mûhold.
Keressünk egy másik mûholdat, amelytõl a távolságunkat 21.000 km-nek mértük
Ekkor a helyzetünk most a két gömb áthatásán, egy körön található.
Ha most egy harmadik mûholdtól is megmérjük a távolságunkat, és az 22.000 km-re adódik, akkor belátható, hogy három gömb áthatásába kerültünk, melyben az egyik mûholdtól 20.000, a másodiktól 21.000, a harmadiktól 22.000 km-re vagyunk. Két pont valamelyikén találjuk magunkat.
Így három mûhold távolsága alapján eljutottunk tartózkodási helyünk két legvalószínûbb pontjához. Annak eldöntése, hogy a két pont közül melyiken is állunk, egy negyedik mûholdra való mérés feladata. Sok esetben negyedik mérés nélkül is eldönthetõ a kérdés.

Távolságmérés
A mûködés alapfeltétele, hogy:
o a mûholdak és a vevõ órája rendkívül pontos (a mûholdakon atomóra van)
o a vevõ órája szinkronban van a mûholdak órájával
A GPS esetében olyan rádiójelet mérünk mely sebessége kereken 300.000. A probléma a futási idõ mérése.
Szinkronizáljuk óráinkat
Az idõmérés során az elsõ probléma az, hogy a mérendõ idõ rendkívül rövid. Ha a mûhold éppen a fejünk felett van, a futási idõ nem több, mint 0,06 másodperc. Ezért nagyon pontos órára lenne szükségünk.
Tegyük fel, hogy van ilyen pontos óránk, hogyan mérjük a futási idõt? Ennek magyarázatára álljon itt a következõ hasonlat:
o Tegyük fel, hogy a mûholdon is, a vevõn is pontosan délben elkezdjük lejátszani a harangszót. Ha a vevõnél állunk, és a hang elér minket a mûholdról is, két verziót hallunk, egyet a mûholdról, egyet a vevõtõl. A kettõ nincs szinkronban. A mûholdról érkezõ változat egy kicsit késik, mivel meg kellett tennie több mint 20.000 km-t.
Ha a késleltetés mértékét meg akarjuk határozni, kapcsoljuk a vevõt olyan késleltetett üzemmódba, amikor a két hang szinkronba kerül. A késleltetés mértéke megegyezik a mûholdról érkezõ jel futási idejével. Most már csak meg kell szorozni a terjedési sebességgel ezt az idõt, és megkaptuk a mûhold távolságát. Ez az alapja a GPS mûködésének.
A déli harangszó helyett a mûhold és a vevõ mást használ, az ál-véletlen kódot (pseudo-random code).
A legfontosabb GPS jelek
Vivõhullám
A GPS mûholdak két különbözõ vivõfrekvencián közvetítenek jeleket.
Az L1 vivõhullám 1575.42 Mhz-esés viszi a helyzeti üzeneteket és az ál-véletlen kódot az idõmeghatározáshoz.
Az L2 vivõhullám 1227.60 Mhz-es, és a sokkal pontosabb katonai ál-véletlen kódot használja.
Az ál-véletlen kódok
Az ál-véletlen kódok két típusát alkalmazzuk. Az elsõ a durván nyert kód (C/A Coarse Acquisition), amely a vivõhullámot modulálja. 1023 bitenként ismétlõdik. Minden mûholdnak saját ál-véletlen kódja van, így a kibocsátó mûholdak egyértelmûen azonosíthatók. A C/A kód a polgári GPS alapja.
A második ál-véletlen kód a P (precise) kód. Ez a kód 266,4 naponként ismétli önmagát. A mûholdak azonosítását az teszi lehetõvé, hogy minden esetben egyedi a kód.
A P kód egy-egy hétnapos darabját rendelték hozzá minden egyes mûholdhoz. A kód generálása minden vasárnap éjfélkor, a GPS-hét kezdetekor újra indul. Ez a kód modulálja mindkét vivõfrekvenciát, L1-et és L2-t egyaránt. Ezt a kódot a katonai felhasználóknak szánták, ezért titkosítják. A P kód titkosított változatát hívjuk Y kódnak. Amióta a P kód sokkal bonyolultabb, mint a C/A, ezt a vevõk sokkal nehezebben érik el. A katonai vevõk is elõször a C/A kódot érik el, utána ugranak a P kódra.
A komplex eljárás segít abban, hogy a vevõ mérés közben nehogy más mûhold jelére szinkronizálódjék. Nagyon ritkán elõforduló véletlen kell ahhoz, hogy egy másik jel is éppen ugyanabban a fázisban ugyanolyan formát mutasson
Amióta minden GPS mûholdnak saját ál-véletlen kódja van, ez a módszer garantálja, nehogy a vevõ véletlenszerûen ráálljon egy másik mûhold jelére. Így az összes mûhold használhatja ugyanazt a frekvenciát annak veszélye nélkül, hogy egymás adását zavarnák.
Titkosított GPS
a rendszer elsõsorban katonai elsõbbséget élvez
a katonák fenntartják maguknak a különleges bemenetet a sokkal pontosabb P kódra. Ennek frekvenciája a polgári C/A kód frekvenciájának 10-szerese (tehát potenciálisan ennyiszer pontosabb), és sokkal ellenállóbb a zavarokkal szemben. Ha titkosították, a neve Y kód, és csak katonai vevõk tudják fogni a megfelelõ kulcs ismeretében.
a kódok lehetõvé teszik a GPS jelek erõsítését.
Idõmérés, óraszinkronizálás
Az órahiba kiejtése
Egy plusz mûhold távolságának mérése segítségével a GPS vevõ ki tudja ejteni az órahiba döntõ hányadát.
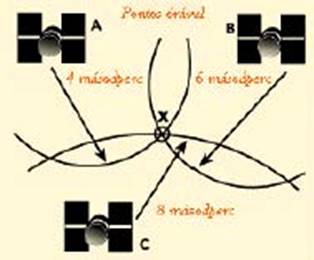
Természetesen a GPS háromdimenziós rendszer, de az ötlet két dimenzióban is jól bemutatható. A harmadik dimenzióhoz eggyel több mérést kell végezni.
Egy mûhold mérésérõl beszélünk távolsági értelemben, tudván, hogy ez idõ alapján számítható, tehát beszélhetünk nyugodtan idõmérésrõl is.
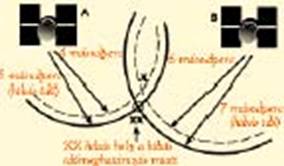
X-ben állunk ténylegesen (ezt mutatná a vevõnk is, ha az órája pontos lenne), de az óra késik 1 másodpercet a világidõhöz képest.
Ezért a vevõ az A mûholdtól 5 másodpercet mér 4 helyett, a B mûholdtól pedig 7 másodpercet 6 helyett. A két kör metszéspontja tehát más, XX helyzetbe került.
Így az X és XX helyek közötti eltérés a pontatlan óránknak köszönhetõ
Ez az a pont, ahol egy geometriai trükkel segíthetünk
Végezzünk mérést egy harmadik mûholdra is. Elõször nézzük meg a hibátlan helyzetet:
Minden mérés köríve áthalad X-en, ami helyen helyzetünkön. Sajnos az 1 másodperces órahibánk újabb helymeghatározási problémákat jelent:
A vastag vonallal húzott körívek mutatják az ál-mérés esetét, amit az órahiba okoz. Ez az "ál" (pszeudo) kifejezés a GPS-ben azt jelenti, hogy a mérést hiba terheli.
Pszeudo-mérés
A pszeudo-mérés ízt jelenti, hogy a mérés még nem teljesen redukált órahibával, stb.
Amíg az A és B mûhold pszeudo-távolságai egy pontot metszenek ki, addig a C pszeudo-távolsága nem tud átmenni ezen a ponton. Ez a különbség a vevõk számítógépeinek köszönhetõ, mivel ott az órahiba.
Mivel az órahiba vagy összeadó-állandó minden mérést befolyásol, a számítógép olyan egyszerû korrekciót keres, mellyel eléri, hogy az összes mérési eredmény egy pontot metsszen ki.
Egy ilyen korrekció meghatározza azt is, hogy a vevõ ezután minden mérésre ezt a korrekciót alkalmazza.
Ettõl kezdve az óra szinkronban lesz a világidõvel. Ezt a korrekciós eljárást állandóan ismételni kell
A mûholdak pontos pályaadatai 1
Hogyan tudjuk meg pontosan, hogy hol vannak? (mintegy 20.000 km magasan repülnek az ûrben)
A nagy magasság elõnyös, mert nem zavarja az atmoszféra. Az orbitális pálya elemei is lényegesen könnyebben számíthatók.
A légierõ minden GPS mûholdnak nagyon pontos pályát tûzött ki, kapcsolódva a GPS vezértervhez.
GPS vezérterv
1994. márciusban a 24. BlockII. mûhold pályára állításával teljessé vált a GPS mûholdak rendszere. Négy további mûhold készenlétben áll, hogy szükség esetén fel lehessen bocsátani.
Egymáshoz viszonyított helyzetük olyan, hogy a föld bármely pontjáról mindig öt mûhold egyszerre látható legyen.
Minden vevõkészülékbe be van programozva egy almanach, amely pillanatról-pillanatra megmondja, melyik mûhold éppen hol tartózkodik az ûrben
A mûholdak pontos pályaadatai 2
A folyamatos figyelés pontosítja ezen értékeket
Ezeken nagyon precíz radarberendezések vizsgálják minden mûhold pontos amplitúdóját, helyzetét, sebességét.
Ezek a vizsgált hibák a pályahibák. Ezek a pályahibák a Hold és a Nap gravitációs hatásváltozásából, valamint a napszél mûholdra ható nyomásából erednek.
Ezek a hibák elég kicsik, de ha nagy pontosságot szeretnénk elérni, számolni kell velük.
Felküldik az információt a mûholdra. Ezután az idõjelben megjelennek a pozícióra vonatkozó információk is.
Így egy GPS jel több, mint egy ál-véletlen kód: navigációs üzenetet is tartalmaz pályahiba információkkal.
Felhasználótól független hibák
Az ionoszféra az atmoszféra jelentõs rétege, a Föld légkörének 50-500km-ig terjedõ része
Nagyrészt ionizált részecskékbõl áll, melyek a GPS jelre zavaró hatást fejtenek ki. A változó elektrontartalom miatt a rádióhullámoknak az optikában használatos törését okozza.
Mivel a hibák nagyobb része az ionoszférában keletkezik, jó lenne matematikai modellekkel eltávolítani ezeket
A troposzféra a föld légkörének alsó mintegy 51 km-es vékonyabb rétege, elektromosan semleges, telített vízgõzzel, hõmérséklete és légnyomása változó.
Viszonylag kisebb hibát okoz.
Vannak egyszerûbb útjai a hibák minimumra csökkentésének. Meg tudjuk jósolni, milyen tipikus hiba jelentkezik egy tipikus napon. Ezt modellezésnek hívjuk, és sokat segít, bár a légkori feltételek ritkán egyértelmûen tipikusak
A Hibák modellezése
A jel útjának késleltetése az atmoszférán keresztül többnyire jósolható.
Az atmoszféra matematikai modelljei számolnak a töltött részecskék hatásával, és a troposzféra gáznemû összetevõivel egyaránt. Mindezek alapján mûhold folyamatosan továbbítja az ionoszférikus modell tényleges összetevõit.
A GPS vevõnek figyelembe kell venni, hogy a jel milyen szög alatt lépett be az atmoszférába, mert a belépési szög meghatározza a zavaró közegben megtett út hosszát.
Másrészt az atmoszféra okozta hibák kezelésének lehetõségét biztosítja két jel sebességének összehasonlítása. A kétfrekvenciás mérés azonban csak fejlettebb készülékeken lehetséges.
Kétfrekvenciás mérés
Ha egy fény áthalad egy közegen, az alacsony frekvenciájú jelek megtörnek, vagy jobban lassulnak mint a magasabb frekvenciájúak.
A jelek sebességének csökkenése lehetõséget ad arra, hogy a GPS jelek két különbözõ vivõfrekvenciáját: L1-et, és L2-õt összehasonlítsuk, következtessünk arra, milyen a közeg (atmoszféra), és javításokat tudunk számítani.
Mivel a katonai vevõk tudnak vivõfrekvencián mérni, a polgáriak nem, némi csalásokat kell a stratégiában alkalmazni.
Terjedési hibák a föld felszínén
A GPS jelek számára a zavaró hatások nem szûnnek meg, miután elérték a Föld felszínét. A jel visszaverõdhet különbözõ akadályokon, mielõtt a vevõhöz érne. (többutas terjedésnek)
A többutas terjedés
A GPS alapkoncepciója feltételezi, hogy a jel a mûholdtól a vevõig egyenes vonal mentén terjed.
Azonban ez nem teljesen igaz: jel mindenfélérõl visszaverõdik a környezetünkben, majd ugyanúgy a vevõre jut, mint egy egyenesen érkezõ jel.
Eredményül többféle jel érkezik a vevõre: elõször a közvetlen, késõbb a környezeti tárgyakról visszaverõdött.
Ha a környezetbõl visszaverõdött jelek még elég erõsek, megtévesztheti a vevõt, és hibás mérést okoz.
Vannak olyan vevõk, amelyek ki tudják választani azt a jelet, amelyik korábban érkezett (amelyik a közvetlen).
Pályahibák
A pályaadatokat folyamatosan közvetítik a mûholdak
A vevõkben egy almanach van, mely az összes mûhold pályaadatát tartalmazza, és új adat érkezésekor módosul
A tipikus pályahibákat óránként javítják
Az alapvetõ geometria képes megsokszorozni a hibákat. Ennek neve a pontosság geometriai felhígulása (Geometric Dilution of Precision = GDOP)
További felhasználótól független hibák
Általában több mûholdra van szükség a helymeghatározáshoz. A vevõ automatikusan kiválaszt néhányat, a többit elutasítja.
Ha a vevõ egymáshoz közeli mûholdakat választ ki, a metszõkörök nagyon lapos szögben metszik egymást. Ez azt jelenti, hogy az ábrán a sötét zónában bárhol lehetünk.
Ha a vevõ egymástól távoli mûholdakat választ ki, a körök jól metszik egymást; derékszögû metszésnél a legkisebb a hibaterület.
A jó vevõk a kiválasztásnál "gondolnak" a GDOP hibára is.
Szándékos zavarás (SA)
Az elvet "Szelektív hozzáférés"-nek (SA = Selective Availability) nevezzük, és azért vezették be, nehogy ellenséges erõk használhassák a GPS-t.
Szelektív hozzáférés
Alapvetõen a Nemzetvédelmi Minisztérium egy bizonyos algoritmus szerint "elrontja" a mûholdak idõ-és pályainformációit. Ez az egyetlen vevõvel dolgozó felhasználókat érinti hátrányosan, mivel a pálya-és idõhiba pozícióhibaként jelenik meg.
Ezek az összetevõk együttesen a SA-t a legnagyobb hibaforrássá teszik a rendszerben. A katonai vevõk rendelkeznek egy dekóderrel, amely eltünteti a SA hibát, így õk sokkal pontosabb eredményt kapnak.
Szerencsére ezek a pontatlanságok nem adódnak össze többszörösen hibaként.
2000-ben megszüntették a GPS pontosságának mesterséges rontását.
A hibaforrások által keletkezõ pontatlanságok mértéke
|
A hiba jellege méterben |
(mûholdanként) szabályos GPS |
Differenciális GPS |
|
Mûhold óra |
|
|
|
Pályahiba |
|
|
|
Ionoszféra |
|
|
|
Troposzféra |
|
|
|
Vevõ zaj |
|
|
|
Többutasterjedés |
|
|
|
SA |
|
|
Európai és Orosz rendszerek
GLONASS (GLObal NAvigation Satellite System)
EGNOS (European Geostationary Navigation Overlay Service)
Adatok feldolgozása
A GPS adatait különféle programokkal fel lehet (kell dolgozni)
o térképi adatbázis létrehozása,
o rögzített útvonalak térképhez illesztése
o illesztési hibák, túlnyúlások, hézagok, kettõzések javítása
DGPS (Differenciál GPS)
Egy rögzített GPS a viszonyítási alap, amelynek helyzetét nagyon pontosan ismerni kell
Így a rögzített GPS-hez képest egy másik GPS pozíciója centiméterre pontosan meghatározható
Két GPS-szel kiszûrhetõ az SA, mert a két mintában a hiba ugyanaz, szûrhetõ
7. Döntéstámogatás
Szakértõi rendszer: olyan embert próbál helyettesíteni, aki az adott szakterületen kimagasló tudással rendelkezik.
Döntéstámogató rendszer: Nem az ember helyettesítése a célja, hanem a döntéshozatal megkönnyítése. (az emberi döntési modellt alig ismerjük)
Az emberi információ-feldolgozás jellemzõi
Intuitív, analógiákra épülõ feldolgozás.
A döntések irányelvei, perspektívái és szabályai többnyire azonosíthatók.
Az emberek ritkán koncentrálnak csupán egy problémára. Inkább különbözõ problémákat párhuzamosan kezelnek.
Az emberi teljesítmény csökkenhet, ha egymással összefüggõ feladatokat kell különbözõ logikai szinten, párhuzamosan kidolgozni.
Az emberek csak korlátozottan képesek logikailag ellentmondásos, vagy statisztikai információkat kezelni.
Az emberi agy sokszor nem jön rá, hogy miért nem tud dönteni
Döntési típusok
Mindennapi cselekvésekkel kapcsolatos döntések.
Vezérléssel kapcsolatos döntések. A cselekvés hatékonyságának biztosítása céljából.
Menedzseri döntések. Az erõforrások hatékony felhasználásának biztosítása céljából.
Stratégiai döntések. A magasabb célok és irányelvek alapján az erõforrások elosztásának biztosítása céljából.
A döntéstámogatói rendszerek feladata
KFKI Csoport Magyarország:
a szükséges információk az üzleti tevékenység minden részletérõl átfogóan és idõben rendelkezésre álljanak.
A vezetõi döntéstámogató rendszerek feladata, hogy a rendelkezésre álló nagy mennyiségû adathalmazból ezeket az információkat szolgáltassa a döntéshozóknak.
A cégek számára felmérhetetlen értékû információhalmazról van szó, hiszen ezek az adatok a szervezet múltját, tapasztalatát tartalmazzák.
A döntéstámogató rendszerek fõbb részei
Adatbázis menedzsment rendszer (Data-base management system, DBMS)
Modellbázis menedzsment rendszer (Model-base management system, MBMS)
Dialógus elõállító és menedzsment rendszer (Dialog generation and management system, DGMS)
A felhasznált információkat befolyásoló legfontosabb tényezõk
A megszerezhetõ információk pontossága
A részletesség szükséges szintje (Hiányos adatokból csak pontatlan következtetés vonható le (közvélemény-kutatás), ezért meg kell adni a szórást is)
Az információ érvényességi idõtartama
Az információ forrása, megbízhatósága
A felhasználás gyakorisága (ha sokszor, a hiba súlya megnõ)
Az információ naprakészsége
Tudásrendezési funkciók
Szabály alapú következtetés (Deduktív): A tulajdonságokat alárendelhetjük egymásnak, bármelyiknek kijelölhetjük, hogy melyik másik tulajdonságtól függjön. A gráf csomópontjai képviselik a függõ tulajdonságokat, ezek az alulról bekötött tulajdonságoktól függenek.
Eset alapú következtetés (Induktív): Ha néhány tucat eset tulajdonságainak java része ismert, akkor kijelölhetünk egyet, amit minõsítésnek tartunk. Feltehetjük a kérdést: hogyan lehet erre a többi tulajdonságból következtetni? Egy entrópia számításon alapuló algoritmus kiválogatja a leginformatívabb tulajdonságokat, és egy olyan gráfba szervezi, ami épp a választ adja.
Példa a szabály alapú következtetésre
Az ABC KFT. ügyviteli rendszere korszerûsítését tûzte ki célul. A bevezetni kívánt szoftver kiválasztásához döntéstámogató rendszert hívtak segítségül.
A szoftverek kiválasztásának szempontjai az alábbiak voltak: Beruházás, Finanszírozás, Vételi ár, Szolgáltatás, Adatfeltöltés, Support
A feladat megoldásának lépései:
Tulajdonságok és lehetséges értékeiknek begyûjtése
Tulajdonságok egymás alá rendelése
Szabályok megadása
Esetek begyûjtése
Szabály alapú következtetés
(Elemzés)
A gráf megrajzolásával a tulajdonságok függési viszonyait adjuk meg. Minden csomópont az õ belé alulról bekötött csomópontoktól (faktortulajdonságoktól) függ. A következtetés tehát mintegy felfelé terjed a gráfon. A gráf csúcsa a végkövetkeztetés.
Szabályok
Egy szabály arra szolgál, hogy megmondja, mi lesz egy függõ tulajdonság értéke, a bemeneti tulajdonságainak (faktorok) adott értékkombinációjára. A szabályok értelmezési tartománya tehát a tulajdonságok értékkészletének összes lehetséges összepárosítása(permutációja).
Az olyan szabályokat, amik a tulajdonságok egyetlen értékkombinációjára érvényesek, elemi szabályoknak nevezzük.
Egy szabály érvényességi tartománya azonban kiterjedtebb is lehet, amennyiben valamely faktor több egymás melletti értékére is vonatkozik. Az ilyen szabályokat komplex szabályoknak nevezzük. Úgy is tekinthetjük, hogy szomszédos elemi szabályokat vontunk össze benne.
Minden szabályhoz tartozik ezenkívül egy kimeneti érték, ami a következtetés során a tulajdonság értéke lesz, amennyiben a faktorok tényleges értékei a szabály érvényességi tartományába esnek.
Példa eset alapú következtetésre
Az ABC KFT. külföldi vendégeit üzleti vacsorára hívta meg. Az éttermek ajánlását döntéstámogató rendszerben modellezték. A éttermek ajánlásakor az alábbi szempontokat vizsgálták: Ételválaszték, Kiszolgálás, Tisztaság, Ár, Adag nagysága, Ízletesség
Fogalmak
Bemeneti tulajdonság (input attribute): Független, megadandó tulajdonság, a függõ tulajdonság ellentéte.
Érték (value): Tulajdonság értékkészletének egy eleme, vagyis egy kategóriája. Esetek tulajdonságának konkrét besorolásaként, vagy szabályok kimeneteként jelenik meg.
Értelmezési tartomány (domain): Faktorok értékeinek összes lehetséges összepárosítása (permutációja). Szemléltethetõ k dimenziós tér pontjaival is, ahol k a faktorok száma.
Érvényességi tartomány (valid range): Szabályhoz rendelt tartomány, amire az vonatkozik.
Faktor (factor): Függõ tulajdonságot befolyásoló tulajdonság. A «Deductive graph»-on a csomópontba alulról bekötött tulajdonság. A ~a B-nek azt jelenti, hogy B függ A-tól.
Függõ tulajdonság (dependant attribute): Tulajdonság, amelyik egy másiktól függ. A függést szabályok írják le.
Informativitás (informativity): Tulajdonság jelzõszáma esetek halmazára vonatkozóanKeretrendszer (shell): Program, ami a tudásbázist tárolja és feldolgozza.
Kimeneti érték (output value): Szabály értéke a következtetés során. Ezt az értéket veszi fel a függõ tulajdonság, ha a faktorok értékkombinációja a szabály tartományába esik.
Következtetés (reasoning): Szabályok a faktorok értékeibõl a tulajdonság értékének meghatározására.
Minõsítõ tulajdonság (benchmark): Kijelölhetõ tulajdonság, amire a modell következtet.
Modell (model): A minõsítõ tulajdonság más tulajdonságokból történõ megállapítását leíró gráf
Szabály (rule): "Ha,.akkor" szabály. érvényességi tartományból, és a hozzá tartozó kimeneti értékbõl áll.
Teljes szabály (complete rule): Érvényességi tartománya a teljes értelmezési tartomány.
Tartomány (range): A szabály értelmezési tartományának a faktorok értékeinek intervallumaival leírt részhalmaza. Szemléltethetõ egy k dimenziós téglatesttel.
Tudásbázis (knowledgebase): Esetek, azok tulajdonságai, valamint azok értékei, relációi és szabályai.
Tulajdonság (attribute): Esetek értékelési szempontja. Bármi, amivel kapcsolatban elvárások szóba jöhetnek
Találat: 2293