 | |||||||||
|  | ||||||||
| |||||||||
| | ||||||||
| kategória | ||||||||||
|
|
||||||||||
|
|
||
A számítástechnika ipari alkalmazásai
A gyártási folyamatok számítógépes irányítása egy célt és ugyanakkor egy kihívást jelentett és jelent ma is a számítástechnika tudomány számára. Egy valós fizikai folyamat szabályozása és vezérlése különleges tervezési és megvalósítási módszereket igényel, melyek biztosítják a helyes és megbízható mûködést bármilyen belátható vagy kevésbé ismert környezetváltozások között. Egy helytelen számítás, vagy egy hardver-meghibásodás jelentõs anyagi károkat és bizonyos esetekben emberi sérüléseket okozhat.
Általában lényeges szerkezeti különbségek vannak a vezérlési alkalmazásokban és az általános feladatokban (pl. irodai, könyvelési, vagy nyilvántartási alkalmazásokban) használt számítógéprendszerek között. A programozás szempontjából más végrehajtási elvek szükségesek, melyek biztosítják a gyors és idõben határolt választ, támogatják a konkurrens és párhuzamos feldolgozást, és nagyobb biztonságot nyújtanak. Ezek közül az interaktív és a valós-idejû programozási módszerek említhetõk. Ezekre a különbségekre és más számítógépes vezérlésre jellemzõ feladatokra szeretne fényt deríteni a jelen elõadás.
1. Alapfogalmak
Bármilyen elõadás kezdetén szükséges meghatározni az alapfogalmakat, melyek az adott téma bemutatásához szükségesek. Egy vezérlési alkalmazásban a következõ fogalmak fordulnak gyakran elõ: - több mûvelet összeállítása amely hat és változtat valamit a paramétereken (pl. kémiai folyamatok, fizikai átalakulások, különbözõ fizikai paraméterek vezérlése, anyagszállítás)
Folyamatvezérlõ rendsz 252i87c er - egy rendszer, amely szabályozza és vezérli a folyamat bizonyos paramétereit;
Ki- /Be-menõ elemek - anyag, energia és információ
A vezérlés célja - elérni és fenntartani egy elõírt paraméter-értéket, egy paraméter idõbeli változását okozni, vagy egy fizikai/kémiai átalakulást okozni
Számítógépes vezérlés - a számítógép alkalmazása a folyamat információ-feldolgozásában és a vezérlõ jelek/paraméterek létrehozásában
Az 1. ábrán látható egy számítógéppel vezérelt folyamat elvi rajza.
![]()
![]()
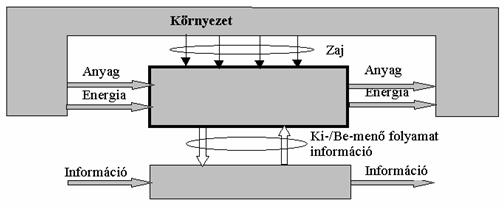
1. ábra. Számítógéppel vezérelt folyamat
Beágyazott rendszer - egy számítógéprendszer, amely része egy komplex elektro-mechanikai rendszernek és felépítése egy meghatározott (szûk) célnak felel meg (célrendszerek)
Valós-idejû rendszer - amelyben egyformán fontos a feldolgozás helyessége és az elõre kitûzött határidõ betartása
Reaktív rendszer - egy rendszer, amely a külsõ és belsõ eseményekre/megszakításokra reagál (nem-szekvenciális rendszer)
2. Egy kis történelem
Az elsõ vezérlõ rendszerek mechanikai elemeket használtak. Az esetek nagy részében egyedi megoldásokat alkalmaztak és a vezérlõ elemeket nem különíthették el a folyamat többi részétõl. Nem lehet egy általános és egységes tervezési módszerrõl beszélni. Különös gondot okozott a folyamat információ-továbbítása.
A következõ lépést a hidraulikus és pneumatikus rendszerek bevezetése jelképezte. Az e fajta megoldásokban már fel lehet ismerni a klasszikus vezérlõrendszer alapelemeit: az érzékelõt, az átalakítót, az erõsítõ elemet meg a végrehajtó elemet. Az információ közvetítése is könnyebben megoldható.
Késõbb, az elektronikus (analóg) rendszerek biztosították a szükséges gyakorlati hátteret az automatika és rendszerelmélet megvalósításához. Elektronikus komponensekkel bonyolultabb szabályozó függvényeket lehetett megvalósítani. A szabályozó rendszer kisebb, olcsóbb és biztonságosabb lett. Ahhoz, hogy a különbözõ típusú vezérlõkészülékeket könnyen lehessen összekapcsolni, egységesített áram és feszültség jeleket vezettek be. Ennek köszönhetõen biztosított a kompatibilitás bármely automatizálási készülékek között, függetlenül a típustól vagy a gyártótól.
A programozható automaták voltak az elsõ digitális vezérlõelemek. Ezek a készülékek egy logikai függvény alapján mûködnek, amely a legtöbb esetben az idõtõl is függ. A készülék szekvenciális mûködést biztosít a vezérelt rendszernek. A rendszer következõ lépése egyaránt függ a bemenõ jelektõl és a rendszer állapotától.
Egy fontos lépést jelentett a közvetlen (direkt) digitális vezérlés (DDC - Direct Digital Control) alkalmazása. Ekkor a számítógép már elég gyors, biztonságos és olcsó volt ahhoz, hogy egy termelõfolyamat vezérlését rá lehessen bízni. Egy ilyen alkalmazásban a számítógép része egy visszacsatolt huroknak, és fõleg szabályozó szerepet tölt be. Ekkor jelentek meg az elsõ számítógép által vezérelt robotok és manipulátorok. Egy pár év elteltével a robotok nélkülözhetetlen komponenseknek bizonyultak egy modern szerelõvonal felépítésében.
Az egyre komplexebb folyamatok vezérléséhez több processzoros hierarchikus vezérlõrendszereket alkalmaztak. Egy ilyen rendszerben a vezérlési, felügyelési, és szabályozási funkciókat több logikai szintre osztják. Ezáltal a rendszer átláthatóbb, és gyorsabban válaszol a vezérelt folyamat változásaira.
Az ipari kommunikációs hálózatok, és az intelligens automatizálási készülékek megjelenése lehetõvé tette az elosztott vezérlõrendszerek fejlesztését. Az elosztott rendszerek párhuzamos feldolgozást, rövidebb válaszidõt, és jobb hibatoleranciát biztosítanak. A következõ táblázat egy pár fontos dátumot tartalmaz a számítógépes vezérlés fejlõdésére vonatkozóan.
|
Év |
Fejlõdési határkövek |
Észrevételek |
|
|
Az elsõ számítógépes vezérlések: - Egyesült Államok - a Texaco cég petrokémiai gyára - Anglia - Imperial Chemical Industry - az elsõ DDC |
- nagy költségek (> 1 millió USD) - alacsony megbízhatóság - lassú feldolgozás |
|
|
Az Apollo ûrrepülési program |
- számítógépre bízott több millió $ értékû felszerelés és emberi élet |
|
|
A mikroprocesszor korszak |
- olcsó, gyors és biztonságos digitális rendszerek |
|
|
Szoftver fejlesztések, ipari hálózatok, osztott rendszerek |
- komplex folyamatok vezérlése |
3. Jellemzõ feladatok a számítógépes vezérlésben
A legtöbb számítógépes vezérlés digitális jelfeldolgozáson alapszik. A jelfeldolgozás során több fajta mûveletet szükséges alkalmazni:
mintavételezés (sample&hold) - amely periodikusan rögzíti a bemenõ jel pillanatnyi értékét;
digitális átalakítás - amely az analóg jelbõl digitális információt állít elõ, és fordítva;
digitális szûrés - amely hasznos frekvenciákat von ki a bemenõ jelbõl, és ezáltal növeli a jel minõségét;
nemlineáris feldolgozás - amely kontextustól függõen jelátalakítást okoz;
Fourier, Laplace, Z átalakítások - amelyek hasznosak a feldolgozás egyszerûsítésében, vagy a bemenõ jel elemzésében.
Különös figyelemmel kell kezelni a digitális mintavétel és feldolgozás során megjelenõ hibákat. Számolni kell azzal, hogy a jelfeldolgozás idõben nem folytonos, a jelek értékei egy diszkrét intervallumhoz tartoznak, és az esetleges túlcsordulások hibás eredményt okoznak. Szükséges elemezni a lépcsõzetesen változó kimenõ jel hatását, amely bizonyos esetekben rezgést okozhat. Helyesen kell kiválasztani a jelek ábrázolásához szükséges bitszámot ahhoz, hogy egy megszabott pontosságot lehessen elérni. A bitszámok növelését általában a bemenõ analóg/digitális átalakító korlátozza.
Az idõ fontos szerepet játszik bármilyen vezérlõ alkalmazásban. Egyrészt azért mert a ki- /be-menõ jelek és a szabályozó függvények egyik fontos paramétere az idõ. A számítások pontosságához szükséges a pontos idõben elvégzett adatgyûjtés és feldolgozás. Másrészt, sok esetben a vezérlõrendszer határolt idõn belül kell válaszoljon a külsõ eseményekre. Ezért szükséges a valós-idejû programozás alkalmazása, amely biztosítani tudja az idõhatárok betartását. A különbözõ konkurrens taszkok indítását és futtatását az idõparaméterek és idõhatárok függvényében kell eldönteni. Egy sajátos valós-idejû tervezési algoritmust szükséges alkalmazni, amely része lehet az operációs rendszernek, vagy be lehet építeni a vezérlési programba. Az idõbeli tervezést a program futtatása elõtt (off-line) vagy közben (on-line) lehet elvégezni. Az elsõ esetben a határidõk betartását garantálni lehet, viszont a rendszer csak az elõre feltételezett körülmények között tud mûködni. Az on-line tervezés nagyobb rugalmasságot biztosít, a rendszer jobban tud alkalmazkodni a környezet változásaihoz, de nem nyújt biztosítékot az idõhatárok betartására. A program szerkezete szempontjából két elvi megoldás lehetséges:
az idõ-vezérelt modell (time-triggered) - amelyben minden taszk indítása szigorúan az idõhöz van kötve, és
az esemény-vezérelt modell (event-triggered) - amelyben a külsõ események megjelenése határozza meg a taszkok indítását; több párhuzamos kérés esetében az indítás az idõhatároktól függ
A számítógépes vezérlésben egy másik jellemzõ feladatcsoportot a folyamat információ begyûjtése és a vezérlõ jelek létrehozása alkotja. Sajátos kimeneti és bemeneti készülékek és interfészek szükségesek a számítógép és a folyamat közti kapcsolathoz. Egyre fontosabb szerepet játszanak a kommunikációs eszközök, amelyek hibamentesen közvetítik a folyamat-adatokat.
A 2. ábrán egy analóg ki/bemenõ csatorna elvi vázlata látható. A bemenõ csatorna a következõ elemeket tartalmazza:
az érzékelõ (szenzor) - amely átalakít egy folyamatváltózót (pl. hõmérséklet, nyomás, szint, stb.) egy villamos mennyiség változásra (pl. feszültség, áram, ellenállás, kapacitás, stb.); a kimenõ jel egy szabványos tartományban változik (pld. 0-10V, 4-20 mA, stb.)
a kommunikációs eszköz - amely továbbítja a mért jelet
az erõsítõ - amely az interfészbe bemenõ jelet illeszti az átalakító tartományához; az erõsítõ szûrési funkciókat is betölt; a szûrés célja - a zavaró frekvencia-komponensek eltávolítása (pl. magas frekvenciás zaj); bizonyos esetekben szükséges galvanikusan elszigetelni a bemenõ jelet a számítógép-rendszertõl; ezáltal a rendszer védve van a véletlenszerû magas feszültségektõl, amelyek egy hibás kapcsolás miatt jelenhetnek veszélyt.
a multiplexer (MUX) - amely lehetõvé teszi több analóg jel beolvasását egy analóg/digitális átalakítóval
a mintavételezõ (sample&hold) - amely periodikusan mintát készít a bemenõ jel pillanatnyi értékébõl
az analóg/digitális átalakító (ADC)- amely digitális információt állít elõ az analóg jel értekébõl
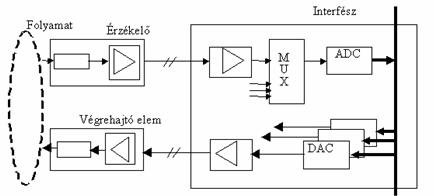
2. ábra. Analóg ki/bemenõ csatornák elvi vázlata
Egy kimenõ csatorna a következõ elemeket tartalmazza:
a digitális/analóg átalakító - amely átalakít egy digitális értéket egy analóg jelre; a kimenõ jel amplitúdóban (AM - Amplitude Modulation), frekvenciában (FM - Frequeny Modulation) vagy impulzus szélességben (PWM - Puls Width Modulation) modulálható;
az erõsítõ - amely elõkészíti a kimenõ jelet a távoli továbbításra; gyakran a kimenõ jelet el kell szigetelni galvanikusan, biztonsági okokból.
a végrehajtó elem - amely a vezérlõ jel alapján változtatja a folyamat egyik paraméterét; gyakran tartalmaz egy mozgó elemet, amelynek helyzete határozza meg a vezérlés nagyságát (pl. szelepek, csapok, motorok, relék, melegítõ elemek, stb.)
Újabban az adatgyûjtés és vezérlés digitális hálózatokon keresztül történik. A hálózatok használata több elõnyt biztosít:
nagyobb zajimmunitás
nagyobb távolságokon lehet hibamentesen közvetíteni a jeleket
alacsonyabb huzalozási költségek (egy szakaszra több automatizálási készülék csatolható)
strukturált adatokat lehet közvetíteni (nem csak egyszerû analóg értékeket)
a rendszer lépésenként fejleszthetõ (egy új elem bekapcsolása nem követel változtatásokat a már létezõ elemekben)
Viszont egy ilyen megközelítés intelligens készülékeket és megfelelõ kommunikációs protokollt igényel. Sajnos az általánosan használt számítógép-hálózatok nem felelnek meg ennek a célnak. Az ipari környezet sajátos tulajdonságokat igényel, mint például: determinizmus (elõrelátható viselkedés), kis zajérzékenység, gyors, meghatározott idõben közvetített üzenetek, magas megbízhatóság, stb. Bizonyos esetekben a hálózat különös kéréseknek kell megfeleljen: biztonságos mûködés robbanásra veszélyes környezetben, adatközvetítés a táplálási kábeleken keresztül, vagy mobil kommunikáció (fizikai kapcsolat nélkül).
4. Tipikus folyamatvezérlési feladatok
A vezérelt folyamat igényei és tulajdonságai alapján több vezérlési módszert lehet alkalmazni:
a. Szekvenciális (sorrendi) vezérlés - amely állapot automatákra épül; a kimeneti vezérlõ jelek, logikai függvények eredménye, amelyekben a bemeneti jelek és az automata állapota szerepel. A rendszer mûködését állapot-diagramokkal vagy idõ-táblázatokkal lehet leírni. Jellemzõ készülék az ilyen fajta vezérlésben a programozható logikai vezérlõ (PLC - Programable Logical Controller).
b. Zárt hurkú (visszacsatolt) szabályozás - amelynek célja elérni és fenntartani egy elõre meghatározott folyamat-paraméter értéket. A vezérlõ jel értékét a hiba nagysága és idõbeli változása alapján szükséges megállapítani. Az egyszerû változatban a kimenetnek csak két állapota van (igen/nem, zárt/nyitott, kikapcsolt/bekapcsolt), amely csak a pillanatnyi eltéréstõl (hibától) függ. Bonyolultabb viselkedésû folyamatoknál az eltérés alakulását is figyelembe kell venni. Ilyen esetekben PID (Proportional Integral Derivative) szabályozást alkalmazunk, amelyben a vezérlõ jelet a pillanatnyi hiba, a hiba integrálja, és a hiba deriváltja függvényében állítjuk elõ. A szabályozás minõsége az együtthatók helyes beállításától függ.
c. Több szintes szabályozás - szükséges olyan esetekben, amikor a folyamat több paramétrét összhangban kell szabályozni. A feladat megoldásához több hierarchikusan rendezett zárt hurkú szabályozót alkalmazunk. Különös gondot okoz a paraméterek közti összefüggés, amelyet nem lehet mindig pontosan kiértékelni, és matematikailag leírni.
d. Alkalmazkodó (adaptive control) és elõrelátó (predictive control) szabályozás - amely olyan esetekben szükséges, amikor a vezérelt folyamat vagy a környezet lényegesen megváltoztatja a dinamikus viselkedését. Ilyen esetekben szükséges, hogy a szabályozó program önállóan tudja változtatni a saját szabályozási paramétereit, a környezeti változások függvényében. A prediktiv szabályozás hasznosnak bizonyul mikor a folyamatnak hosszú holt ideje van (késõn érzékelhetõ a vezérlés hatása), vagy gyakran jelennek meg mérési hibák. A szabályozó tartalmaz egy részt, amely meg tudja jósolni a folyamat jövendõ alakulását és ennek alapján egy pontosabb vezérlõ jelet tud elõállítani.
e. Optimális vezérlés - amelynek célja egy általános költség-függvény csökkentése, vagy egy cél-függvény növelése. Általában az ilyen jellegû vezérlést egy több szintes folyamatvezérlési rendszer felsõbb szintjén alkalmazzák. Az optimális vezérlés több stratégia alapján mûködhet: a költségek vagy a nyersanyag-fogyasztás csökkentése, a termelés vagy a nyereség növelése, stb.
5. Számítógépen alapuló felügyelõ és vezérlõ rendszerek felépítése
A vezérelt folyamat komplexitásának függvényében különbözõ felépítésû rendszereket lehet alkalmazni:
a. Központosított vezérlés - feltételez egyetlen adat-feldolgozó egységet, és minden ki- és bemenõ jel egy pontban van összegyûjtve. Ezt a megoldást egyszerû folyamatoknál lehet alkalmazni. Könnyû a megvalósítása és az egész rendszer átlátható. Viszont kevésbé megbízható, költséges a huzalozás, és hosszú a feldolgozási ciklus, abban az esetben, ha több paramétert kell felügyelni. Bármilyen meghibásodás esetén az egész rendszer leáll.
b. Hierarchikus felügyelés és vezérlés - a divide-et-impera elven alapszik, ami a vezérlési funkciók több szintre való elosztását feltételezi. Ez a megoldás komplex folyamatok vezérlésére alkalmas, gyorsabb választ és jobb átláthatóságot biztosít. A gyors választ igénylõ paraméter-szabályozást az alacsonyabb szintekre szükséges elhelyezni, viszont az optimális vezérlési meg folyamat felügyelési szolgálatokat magasabb szintekre kell helyezni. A megbízhatóság szempontjából a hierarchikus megoldás is korlátozva van, az egy pontból történõ felügyelés miatt.
c. Osztott felügyelés és vezérlés - feltételez egy hálózaton alapuló több feldolgozó állomásos rendszert. A vezérlési alkalmazás funkcionalitását szolgálatokra kell osztani, amelyeket szerverek látnak el. A szerverek a hálózat különbözõ csomópontjaiban vannak elhelyezve. Biztonsági okokból egy szolgálatot több csomópont tud ellátni. Ez a megoldás komplex folyamatokra alkalmas, ahol sok a folyamat-paraméter és kritikusak az idõhatárok. Az elõnyök közül a következõket lehet említeni: olcsó huzalozás, olcsó készülékek szükségesek, a rendszer folyamatosan fejleszthetõ és meghibásodás esetén könnyen újrakonfigurálható. Ugyanakkor új feladatok merülnek fel a tervezõ számára, mint például: szinkronizálás, párhuzamos futtatás, valós-idejû programozás, címzés és hozzáférés távoli adatokhoz, kommunikációs protokollok, stb.
Az osztott vezérlõrendszerek megvalósításában fontos szerepet játszanak az ipari hálózatok. Ez a hálózat kategória a vezérlõ alkalmazások sajátos kérelmeinek felel meg: vezérlésre alkalmas üzenet-struktúra, gyors átvitel (elõre kiszámítható), megbízható és biztonságos mûködés és alacsony megvalósítási költségek.
Egy tejes gyártási folyamat számítógéppel való vezérlése több szervezési szintet igényel. A 3. ábrán látható a CIM modell (Computer In Manufacturing), amely piramis formájában szervezi a vezérlési szinteket. A következõ szintek szükségesek:
tervezési és szervezési (adminisztratív) szint: terméktervezés, nyilvántartás, anyagbeszerzés
felügyelési szint: optimális vezetés és felügyelés
folyamat szint: gyártási folyamat vezetése
terepszint: adatgyûjtés és vezérlés
technológiai folyamat: gyártás

3. ábra. A CIM piramis modell
*CAD - Computer Aided Design - számítógépes tervezés
CAE - Computer Aided Engineering - számítógépes gyártáselõkészítés
CAM - Computer Aided Manufacturing - számítógéppel vezérelt gyártás
SCADA - Supervision Control and Data Acquisition - felügyelési és adatgyûjtési alkalmazás
PLC - Programmable Logic Controller - programozható logikai vezérlõ
PID - Proportional Integrative and Derivative control - arányos, integrativ és derivativ vezérlés
A számítástechnika alkalmazása az ipari vezérlésben gyakran egy bonyolult vállalkozás, amely több tervezési terület ismeretét igényli (pl. hardver tervezés, programozás, valós-idejû rendszerek tervezése, rendszerelmélet, digitális jelfeldolgozás, ipari hálózatok stb.). Sajátos fejlesztési eszközök és módszerek szükségesek ahhoz, hogy egy adott vezérlési alkalmazás különbözõ jellegû kéréseit megfelelõen lehessen kielégíteni.
Irodalomjegyzék
D. Gorgan, G. Sebestyén: Structura calculatoarelor, Ed. Albastra, 2000.
P. Deshpande: Computer Process Control, Prentice Hall, 1987.
G. Olsson, G. Piani.: Computer Systems for Automation and Control, Prentice Hall, 1992.
Fuzzy logika és alkalmazásai
Bíró Botond, VI. éves hallgató
Kolozsvári Mûszaki Egyetem
Fuzzy logika min sítõ logika
Döntéshozatal - nyelvi változókkal leírt feltétel alapján történik.(pl. ha az autó sebessége közepes és kicsit síkos az út, akkor a féktávolság kicsit nagy)
Eltérés a hagyományos logikától - az értékek nem diszkrét értékek már, hanem egy értékcsoporthoz tartoznak.
"Hovatartozási függvények" adják meg, hogy egy hagyományos érték mennyire tartozik egy fuzzy értéktartományba.
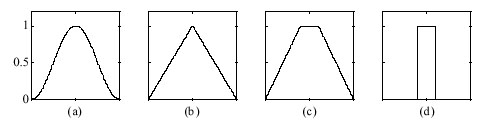
Gauss görbe, b) háromszög alapú, c) trapéz alapú, d) egyedülálló (singleton)
Fuzzy érték tartományok "fuzzy halmazok".
Logikai mûveletek - fuzzy halmazokon: és (min), vagy (max), nem.
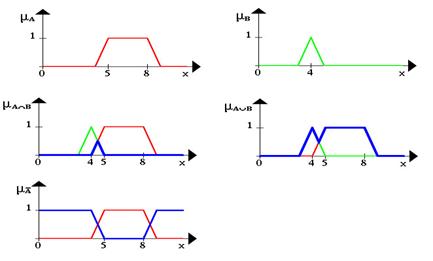
Logikai mûveletek fuzzy halmazokkal.
Mire jó ez?
Vezérlésre ott, ahol a szabályokat egyszerûbb verbálisan megadni, mint matematikai képleteket használni.
Egy példa fuzzy vezérlésre
A merev felfüggesztésû, fordított inga egyensúlyban tartása (Mamdani vezérlés).
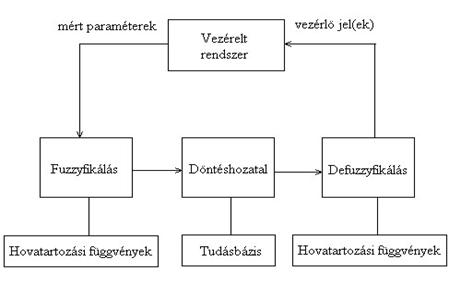
Egy fuzzy vezérlõ blokk diagramja:
Szabályokat tartalmazó táblázat:
|
Szögsebesség |
Szög |
|||||
|
|
NH |
NL |
Z |
PL |
PH |
|
|
NH |
|
|
NH |
|
|
|
|
NL |
|
|
NL |
Z |
|
|
|
Z |
NH |
NL |
Z |
PL |
PH |
|
|
PL |
|
Z |
PL |
|
|
|
|
PH |
|
|
PH |
|
|
|
Hovatartozási függvények:
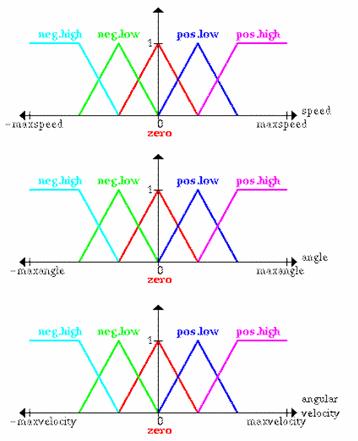
Fuzzyfikálás - eldönti, hogy a mért paraméterek (szög/szögsebesség) mely fuzzy halmazoknak az elemei:
|
|
|
Döntéshozatal - a kapott fuzzy halmazok Descartes szorzatára alkalmazza a szabályokat (min - max módszer):
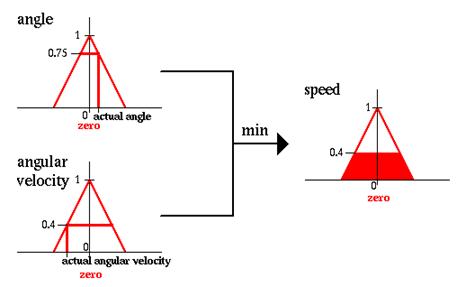
Mindegyik párra alkalmazva:
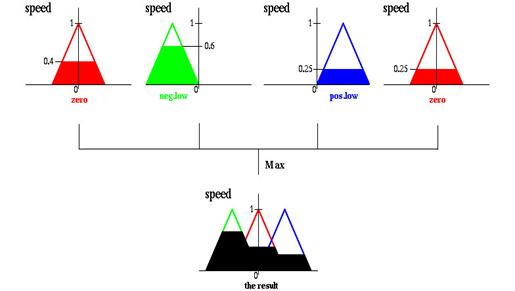
Defuzzyfikálás: a kapott fuzzy értéket átalakítja valós értékké (súlypont módszer).
A sebességhez hozzáadódik a kapott érték ("a vezérl jel integráló hatással dolgozik").
Alkalmazások
Hol ajánlott fuzzy vezérlést alkalmazni:
Nagyon bonyolult folyamatoknál, ahol nincs egy egyszerû matematikai modell.
Nagyon nem-lineáris folyamatoknál.
Ha lingvisztikailag meghatározott ismereteket kell feldolgozni.
Hol nem ajánlott:
A hagyományos vezérlés elfogadható eredményt ad.
Egy könnyen megoldható és helyes matematikai modell már létezik.
A problémának nincs megoldása.
Néhány valós alkalmazás:
Vízierõmûvek zsilipjeinek a vezérlésénél. (Tokió Electric Pow. )
Videokamerák fókuszálása sporteseményeknél. (Omron)
Hatékony és stabil autó-motor vezérlés. (Nissan)
Képfelismerés. (Canon, Minolta)
Rák diagnózis. (Kawasaki Medical School)
Szoftver tervezés.
Fogyó anyag tartalékolás. (Hitachi)
Buszmenetrend készítése. (Toshiba)
Irodalomjegyzék
Peter Bauer, Stephan Nouak, Roman Winkle: A brief course in Fuzzy Logic and Fuzzy Control
dr. Dávid László: Logica fuzzy si controlul fuzzy
Találat: 3841