 | |||||||||
|  | ||||||||
| |||||||||
| | ||||||||
| kategória | ||||||||||
|
|
||||||||||
|
|
||
Az anyag-, energia-, gyártási és üzemeltetési költségek növekedése szükségessé, a numerikus módszerek fejlõdése pedig lehetõvé tette az optimális méretezési módszerek széleskörû elterjedését a mûszaki gyakorlatban. E módszerek segítségével elérhetõ, hogy a különbözõ konstrukciók, rendszerek, stb. ne csak kielégítsék a velük szemben támasztott követelményeket, hanem lehetõséget nyújtsa 636e46g nak a költségek csökkentésére is. Az optimális méretezés elterjedésének kezdeti szakaszában a szerkezet tömegét ill. térfogatát igyekeztek csökkenteni, majd késõbb a problémákat a költségek irányából közelítették meg. A tömeg csökkentésére vonatkozóan a természetben sajátos példákat találunk. Nevezetesen a fák ágai az elágazási helyeken a legvastagabbak, mivel a hajlító nyomaték és a nyíróerõ értéke ott a legnagyobb. Hasonlóképpen a jégcsap keresztmetszete a teljes húzóerõt felvevõ keresztmetszetben a legnagyobb. Az említett példák az alak optimálására vonatkoznak, de a természetben ezeken kívül is számos egyéb optimumra törekvést figyelhetünk meg.
Az optimális méretezési módszerek eredményes mûszaki alkalmazásához ismerni kell a matematikai módszereket és tisztában kell lenni a feladat mûszaki tartalmával. Ennek megfelelõen elõször röviden áttekintjük a matematikai alapokat, majd különbözõ mûszaki alkalmazásokkal ismerkedünk meg.
Az optimálás érdekében elõször meg kell választani azokat a paramétereket, geometriai méreteket, stb., melyeket ismeretleneknek tekintünk. Ezen ismeretlenek alkotják a változók halmazát és összességüket a következõképpen jelöljük: x= x1, x2,.,xn T, ahol n az ismeretlenek száma. Ezt követõen meg kell fogalmazni a célfüggvényt, f(x)-et, ami lehet a szerkezet tömege, térfogata, költsége (beleértve az anyag-, gyártási-, üzemeltetési-, stb. költségeket). A célfüggvényhez kapcsolódóan meg kell fogalmazni azokat a feltételeket, melyeket az adott szerkezetnek, rendszernek üzemelés során ki kell elégítenie. A korlátozási feltételek lehetnek egyenlõtlenségek (gj(x)), ill. egyenlõségek (hj(x)). A korlátozások vonatkozhatnak a maximális feszültségekre, alakváltozásokra, felületi hõmérsékletre, stb. A fentiekben vázolt feladat matematikailag úgy fogalmazható meg, hogy meg kell határozni a többváltozós függvény minimumát úgy, hogy a kapott megoldás elégítse ki a megfogalmazott korlátozási feltételeket:
|
gj(x)≥0, |
min f(x), |
j=1,2,.,m; |
|
|
hj(x)=0, |
j=m+1,.,p. |
A fentebbi függvények lineárisak, nemlineárisak ill. speciális típusúak lehetnek. Elõfordul, hogy hiányoznak az egyenlõségi ill. az egyenlõtlenségi korlátozások, vagy mindkettõ. A változók száma tetszõleges lehet. Ennek megfelelõen különbözõ optimálási feladatokkal állunk szemben, melyek megoldása sokszor nehézségekbe ütközik. A matematikai optimálási módszerek lényegében az (1) alatt megfogalmazott feladat megoldásához kapcsolódnak.
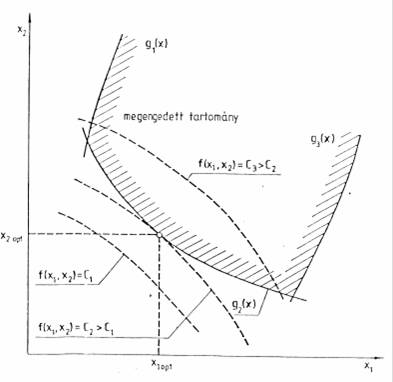
1. ábra. Kétváltozós optimálási feladat
Az (1)-es probléma megoldása két változó (két ismeretlen) és három egyenlõtlenségi korlátozás esetén nagyon szemléletesen ábrázolható (1. ábra). A két ismeretlen (x1, x2) koordinátarendszerében ábrázolni lehet a g1(x), g2(x), g3(x) egyenlõtlenségi korlátozási feltételeket. A korlátozási feltételek meghatározzák az ún. megengedett tartományt, melynek minden pontja kielégíti a feltételeket. A megengedett tartomány pontjai közül meg kell keresni azt (azokat), melyek egyúttal a célfüggvény minimumát adják. Ha a célfüggvénynek különbözõ C1, C2, C3 értékeket adunk, akkor azt tapasztaljuk, hogy önmagával párhuzamosan tolódik el. Ahol a célfüggvény érinti a megengedett tartományt, ott leolvashatjuk az optimális értékeket (x1min, x2min). Ezen értékeket a célfüggvénybe helyettesítve megkapjuk annak minimumát. Bonyolult függvények esetén azonban nemcsak egy, hanem több helyi (lokális) minimum lehet (2. ábra). A mûszaki problémák megoldása során azonban az a cél, hogy a helyi minimumok közül megkeressük azt, amelyik a célfüggvénybe helyettesítés után a legkisebb értéket adja. A lokális minimumok közül ezt az értéket nevezzük globális minimumnak. Az ábrán látható, hogy a függvénynek az x1 és x3 értéknél helyi (lokális) minimuma van. A kettõ közül azonban a globális minimum x1-nél van. Hasonlóképpen az x2 és x4 értéknél a függvénynek helyi maximuma van. A globális maximum azonban az x2-nél jelentkezik. Konvex megengedett tartomány esetén a lokális minimum egyúttal globális is. Konvex a tartomány, ha tetszõleges két pontját összekötõ egyenes minden pontja a tartományon belül helyezkedik el. A következõ részben röviden áttekintjük az optimálási módszerek történeti fejlõdését és csoportosítását.
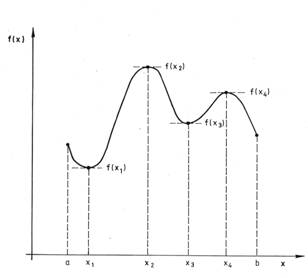
2. ábra. A függvény szélsõérték-helyei
Az optimálási módszereket különbözõ szempontok alapján lehet csoportosítani . Emiatt a szakirodalomban többféle megközelítéssel találkozunk. Az alábbiakban a történeti sorrendet szem elõtt tartva röviden áttekintjük a módszerek fejlõdését.
E módszert Newton (1643-1727) és Leibnitz (1646-1716) alapozta meg. Õk egymástól függetlenül egyidejûleg dolgozták ki a differenciálszámítás alapjait. Ezáltal lehetõség nyílt a korlátozások nélküli egy- ill. többváltozós függvények szélsõértékének
|
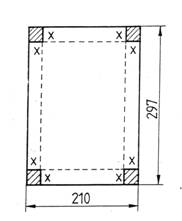
3. ábra. A doboz terítéke |
meghatározására és számos egyszerûbb optimálási probléma megoldására. Közülük egy olyan szemléletes feladatot mutatunk be, ami segíti az optimálás lényegének megértését. Feladatunk, hogy egy A4-es lap (210x297 mm) minden sarkából vágjunk ki egy x x méretû négyzetlapot, majd a megmaradt síkidomból az oldalak felhajtásával készítsünk egy nyitott dobozt (3. ábra). Látható, hogy végtelen sok megoldás létezik, de feladatunk az, hogy a doboz térfogata (V) legyen maximális. A térfogat: V(x)=(297-2x)(210-2x)x=4x3-1014x2+62370x. |
Könnyen belátható, hogy a V(x) függvény maximumának helye megegyezik az f(x)=-V(x) függvény minimumának helyével. A szélsõérték (minimum) létezésének szükséges feltétele, hogy az f(x) függvény deriváltja legyen zérus:
f'(x)=-12x2+2028x-62370=0.
A másodfokú egyenlet megoldása révén két értéket kapunk: x1=40,423 mm; x2=128,577 mm. Az eredményekbõl látható, hogy gyakorlatilag csak az x1 méretû kivágás valósítható meg. (A függvény deriváltjának vizsgálatával ellenõrizhetõ, hogy valóban létezik szélsõérték). Az x1 értéknek a V(x) függvénybe helyettesítése után megkapjuk a doboz maximális térfogatát Vmax=1128495,1 mm3.
A variációszámítás alapjait Bernoulli (1654-1705), Euler (1707-1783), Lagrange (1736-1813), Hamilton (1805-1865), Weierstrass (1815-1897) fektette le. A variációszámítás módszere elõnyösen alkalmazható statikai, dinamikai, rezgéstani, stb. problémák megoldásakor . Legegyszerûbb matematikai megfogalmazása az, hogy meg kell határozni azt az u(x) függvényt, amelyik minimálja az A funkcionált:
![]()
ahol u' és u" az u(x) függvény elsõ ill. második deriváltja.
A lineáris programozás egy alapvetõ matematikai programozási módszer. Jellemzõje, hogy az (1) alatti megfogalmazásban mind a célfüggvény, mind a korlátozások a változók lineáris függvényei. A lineáris optimálás elterjedését jelentõsen meggyorsította a digitális számítógépek elterjedése és hozzáférhetõsége. A lineáris programozás szimplex módszerét Dantzig dolgozta ki 1947-ben . A módszert eredményesen alkalmazták gazdasági feladatok megoldására, de segítségével sok mûszaki probléma megoldása is lehetõvé vált. Számos képlékeny méretezési problémát fogalmaztak meg lineáris optimálási feladatként és így méreteztek rácsos tartókat, keretszerkezeteket, stb.
Amennyiben az (1) alatt megfogalmazott feladatban a függvények valamelyike nem lineáris, akkor nemlineáris optimálási feladattal állunk szemben. A mérnöki problémák tekintélyes része nemlineáris, emiatt e módszer különös jelentõséggel bír. A megoldási módszer Lagrange nevéhez fûzõdik, aki az (1)-ben megfogalmazott feladat megoldását dolgozta ki egyenlõségi korlátozások esetén. Lényege, hogy a célfüggvényhez hozzáadta az egyenlõségi korlátozási feltételeket (m=0) és így kapott egy L(x, lj) függvényt:
![]()
ahol lj - az ún. Lagrange szorzók.
A Lagrange függvény minimumát ezután deriválással lehet meghatározni. A módszer korai indulása ellenére viszonylag keveset fejlõdött a XX. század közepéig. A nagysebességû és nagykapacitású számítógépek azonban ösztönözték és lehetõvé tették az újabb módszerek kutatását és az optimálás széleskörû elterjedését. 1951-ben Kuhn és Tucker az (1) alatti probléma megoldására egyenlõtlenségi korlátozások esetén megoldási módszert dolgozott ki, ami a 60-as évektõl optimalitási kritériumok néven terjedt el . Lényege, hogy meg kell határozni az f(x) célfüggvény minimumát
gj(x)£ j=1,., m,
korlátozások esetén. Az egyenlõtlenségi korlátozásokat nem negatív
kiegészítõ változók ![]() hozzáadásával
hozzáadásával
Gj(x,yj)=gj(x)+ ![]() j=1,.,
m
j=1,.,
m
egyenlõségekké alakítjuk át, ahol a kiegészítõ változók ismeretlenek. Ezután a problémát a Lagrange-féle multiplikátoros módszerrel lehet megoldani. A Lagrange függvény
L(x,yj,lj)=f(x)+![]() (x,yj). (2)
(x,yj). (2)
A lokális minimum szükséges feltétele:
![]() i=1,., n; (3)
i=1,., n; (3)
![]() j=1,.,
m; (4)
j=1,.,
m; (4)
![]() ,
j=1,., m. (5)
,
j=1,., m. (5)
Aktív feltétel esetén gj=0 így yj=0, lj£0. Ha a feltétel nem aktív, akkor gj<0, yj¹0 és lj=0. Aktív feltétel esetén tehát a (4) és (5) helyett a
lj³0 és ljgj=0
feltételeket használjuk. A
![]() i=1,., n;
i=1,., n;
lj³ ljgj=0
feltételek az ún. Kuhn-Tucker féle optimalitási kritériumok. Konvex megengedett tartomány esetén a Kuhn-Tucker feltételek a globális minimum szükséges és elégséges feltételeit adják.
A modern szerkezetoptimálás terén az elsõ átfogó munka Schmit nevéhez fûzõdik , aki a matematikai programozási módszert nemlineáris egyenlõtlenségi korlátozások esetén rugalmas szerkezetek méretezésére alkalmazta bonyolult terhelési feltételek mellett. Ki kell emelni még azt is, hogy ez a tárgyalásmód új tervezési filozófiát honosított meg a mérnöki gyakorlatban és hozzájárult ahhoz, hogy a végeselemes analízis és a nemlineáris programozás meghonosodjon az automatizált optimális méretezésben. A nemlineáris optimálás erõteljes fejlõdésnek indult amikor Caroll tanulmánya alapján Fiacco és McCormick kifejlesztette a szekvenciális feltétel nélküli minimálás módszerét (a SUMT-módszert). Lényege, hogy az (1) alatti feltételes szélsõérték feladatot egy P(x,rk) függvény sorozatos feltétel nélküli szélsõérték feladataira alakítja át.
![]()
ahol az rk paraméter kezdõ értékétõl (r1-tõl), illetve csökkenésének mértékétõl függ a konvergencia sebessége. Az rk értéke a számítás során monoton csökken
r1>r2.> rk+1=rk/c; c>
ahol c állandó.
![]()
Kimutatható, hogy rk 0 esetén a feltétel nélküli függvényminimumok sorozata az eredeti f(x) függvény feltételes szélsõértékéhez tart:
A következõkben egy számpéldát mutatunk, ami segíti a módszer lényegének megértését.
Számpélda:
Keressük az
f(x)=x2-x1
célfüggvény minimumát
£g1(x)=x1
0£g2(x)=x2-0,25![]()
feltételek esetén. Elõállítjuk a korlátozások nélküli függvényt logaritmikus büntetõ tag alkalmazásával:
![]()
|
4. ábra. A feltétel nélküli optimumok elhelyezkedése |
A függvényt a változók szerint differenciálva megkapjuk az optimum szükséges feltételét
Az egyenletrendszer megoldása után az
összefüggések adódnak. Csökkenõ rk paraméterek esetén a kapott eredményeket az 1. táblázat tartalmazza. |
1. táblázat. A célfüggvény és a változók értékei az rk paraméter függvényében
|
rk |
x1(rk) |
x2(rk) |
P(x,rk) |
f(x) |
|
|
|
|
|
|
|
¼ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
minimum |
|
|
|
|
A táblázat adatainak megfelelõen a 4. ábra a célfüggvényt, a korlátozási feltételeket, valamint a feltétel nélküli optimumokat mutatja. Látható, hogy a feltétel nélküli optimumok trajektóriája a feltételes szélsõérték-feladat megoldásához tart, miközben a korlátozás nélküli P(x,rk) függvény és az f(x) függvény értékei fokozatosan közelednek egymáshoz.
A nemlineáris optimálás terén napjainkban is számos publikáció jelenik meg és az optimum megkeresésére sok algoritmust dolgoztak ki.
Ha az (1) alatt megfogalmazott függvényekben polinomok szerepelnek, akkor ezt a szakirodalom geometriai programozásnak nevezi és a módszer a nemlineáris optimálási feladatok meghatározott körének megoldására alkalmas
A kvadratikus programozási feladat legtöbbször jól kezelhetõ nemlineáris optimálási probléma, mivel a célfüggvény konvex és a korlátozási feltételek lineárisak. Az ilyen feladatokat a lineáris optimálás szimplex módszerének megfelelõ módosításával lehet megoldani.
Az utóbbi években a több célfüggvényes optimálást egyre elterjedtebben alkalmazzák szerkezetoptimálási problémák megoldásakor . A módszer kidolgozása Pareto nevéhez fûzõdik, aki ezt 1896-ban ismertette. Matematikai megfogalmazása a következõ:
minF(x)=,
|
gj(x)£ |
j=1,., m, |
|
hj(x)=0 |
j=m+1,., p, |
ahol fi(x) - az i-edik célfüggvény; gj(x) ill. hj(x) - az egyenlõtlenségi ill. egyenlõségi korlátozási feltételek. A fentebbi függvények némelyike vagy mindegyike nemlineáris lehet. A probléma megoldására számos módszer létezik, de közülük legismertebb az ún. goal módszer.
A szétválasztásos (szeparábilis) programozás lényege, hogy az f(x) célfüggvény és a gj (x) korlátozási feltételek az xi változók szerint szétválaszthatók. Az ilyen problémák megoldására ismertet algoritmust az irodalom.
Az egész számú optimálás az utóbbi idõben gyors fejlõdésnek indult, mivel vannak olyan optimálási feladatok, ahol a változók csak meghatározott egész számú értékeket vehetnek fel. Ha a változók csak egész számok lehetnek, akkor egész számú (integer) programozással állunk szemben. Ha csak a változók némelyike vesz fel egész értéket, akkor vegyes-egész számú programozásról van szó, ha viszont a változók csak 0 és 1 értéket vehetnek fel, akkor ezt "nulla-egy" programozási feladatnak nevezzük.
A dinamikus programozás olyan matematikai módszer, amelyik jól használható többlépcsõs döntési problémák megoldásakor.
A véletlenszerû vagy valószínûségi programozás olyan problémákkal foglalkozik, melyeknél az optimálási paraméterek némelyikét vagy mindegyikét valószínûségi függvényekkel lehet leírni.
Az optimálási problémák megoldásához különbözõ keresõ algoritmusokat dolgoztak ki és napjainkban ezeket fejlesztik tovább ill. újabb algoritmusok is születnek. Az automatizált szerkezetoptimálás terén óriási elõrelépést jelentett a véges elemes módszer és az optimálási módszer összekapcsolása
Az optimáló módszerek többségénél a korlátozási feltételeket függvények formájában kell megfogalmazni, ami bonyolult szerkezetek esetén nem lehetséges. Ilyen esetekben az optimáló módszereket csak úgy lehet alkalmazni, ha a korlátozási feltételek aktuális értékét (pl. feszültségeket, alakváltozásokat, stb.) valamilyen numerikus módszerrel elõzõleg meghatározzák. Ez az igény vezetett el a véges elemes módszer és az optimálás összekapcsolásához.
Az optimálás terén az ún. evolúciós algoritmusok erõteljes térhódítása figyelhetõ meg . A módszert gyakorlati problémák megoldására az 50-es években és a 60-as évek elején kezdték alkalmazni. A munkák alapján egymástól függetlenül három iskola fejlõdött ki:
evolúciós programozás,
evolúciós stratégiák és
genetikai algoritmusok.
Valamennyi módszer az evolúciós folyamat alapelveit alkalmazza. A 90-es évek kezdetétõl a három módszer egymásba folyt és összeolvadt. Azóta a különbözõ iskolák algoritmusainak megjelölésére az evolúciós algoritmusok megnevezés terjedt el. Az evolúciós algoritmusok és a véges elemes módszer összekapcsolását használja az ún. evolúciós szerkezetoptimálás.
A matematikai optimálási módszereket fel lehet osztani analitikus és numerikus módszerekre. Az analitikus módszereknél a célfüggvény, valamint a korlátozási feltételek függvények alakjában megfogalmazhatók, a szélsõérték meghatározása pedig a differenciál- ill. variációszámítás módszereivel történik. A numerikus módszerek matematikai programozási technikákat használnak és segítségükkel olyan problémák is megoldhatók, melyek analitikusan nem kezelhetõk.
A következõ részben áttekintjük a költségmegtakarítás érdekében figyelembe veendõ szempontokat, valamint az optimálási problémák megfogalmazását.
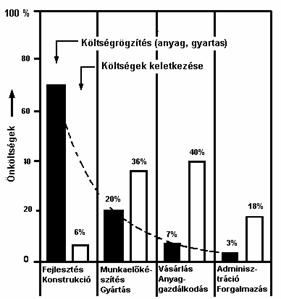
Minden egyes mûszaki probléma megoldásakor fontos, hogy milyen költségekkel valósítható meg. Rendszeres és alapos költségelemzéssel fel lehet tárni a költségeket befolyásoló tényezõket. Ez azért fontos, mert a konstrukciók költségeinek legnagyobb részét a tervezés folyamán a konstruktõr automatikusan lerögzíti . Ez a lerögzített hányad különbözõ területeken végzett elemzések alapján eléri a 70% -ot (VDI-Richtlinie 2235). Az 5. ábra szemléletesen mutatja az adott munkafázisban lerögzített (fekete oszlop) és a keletkezett költségeket (fehér oszlop). A gyártási költségeket értékelemzéssel csökkenteni lehet, ugyanakkor elmondható, hogy az értékelemzést a gyártmányok többségénél nem végzik el.
|
5. ábra. A költségek alakulása |
A tervezési folyamat során a költségek korai felismerése a gazdaságos termékfejlesztés alapja. A termékek költségének csökkentése céljából léteznek olyan általános szabályok, amelyeket a tervezõknek szem elõtt kell tartaniuk a költségmegtakarítás érdekében. Néhány könnyen betartható költségcsökkentési szabály: meglevõ/kereskedelmi egységek használata; szerelési egységekre ill. kevés alkatrészre törekvés; alkatrész csoportok, szabványos alkatrészek elõnyben részesítése; kereskedelmi kötõelemek használata; |
a szükségesnél nem finomabb felületek ill. tûrések alkalmazása;
szabványos anyagok és félkész-termékek használata;
a darabszámnak megfelelõ gyártástechnológia megválasztása;
a szükségesnél nem drágább szerszámok és berendezések használata, stb.
A felsoroltakon túlmenõen számos egyéb költségcsökkentési szabály létezik, melyeket tervezéskor célszerû összegyûjteni és figyelembe venni. Az egyszerûbb költségcsökkentési lehetõségek mellett léteznek olyan módszerek is, melyek segítségével matematikai alapon vizsgálhatók a költségek. Ezeket az eljárásokat költségbecslési módszereknek nevezzük.
A konstrukciók költségbecslése vagy más néven a költségek korai felismerésének módszere a nyolcvanas években indult erõteljes fejlõdésnek . A kutatók különbözõ indíttatásból és különbözõ módon közelítették meg a problémát. A tervezési változatok megítélése szempontjából a költségek korai felismerése kiemelkedõ jelentõségû, mivel ily módon a konstruktõr tevékenységével jelentõs mértékben befolyásolni tudja a költségek alakulását. A költségek (anyag- és gyártási) számítására különbözõ módszereket dolgoztak ki, melyek közül a legfontosabbak:
relatív költségekkel való számítás
számítás regressziós egyenletekkel
hasonlósági összefüggésekkel való számítás és
gyártástechnológiai mûveletek mûveleti elemként való számítása
A fenti módszerek közül az anyagköltségek, a félkész termékek és a vásárolt termékek számításánál elsõsorban a relatív költségekkel való kezelésmód terjedt el, míg a gyártástechnológiai költségek célszerûen mûveleti elemként kezelve számíthatók. A relatív költségeknél az árakat ill. a költségeket valamilyen mennyiségre (méret, anyag, stb.) vonatkoztatják. Ennek elõnye, hogy az adatok sokkal hosszabb ideig helytállóak összehasonlítva az abszolút költségekkel. Anyagokra, félkész termékekre és késztermékekre relatív költség katalógusokat dolgoztak ki. A félkész termékek (csövek, négyszög-szelvények, különbözõ profilok) közelítõleg azonos fajlagos árral rendelkeznek hengerléssel való gyártás esetén. Azonos tömeg esetén viszont lényegesen drágábbak a húzott és a zárt profilok
A regressziós egyenletekkel való költségszámítás alapos elõkészítõ munkát és nagy idõráfordítást igényel, amihez legtöbbször számítógépre van szükség. A -as irodalom ismerteti a kézi formázású, szürkeöntvénybõl készült darabok regressziós egyenletét.
|
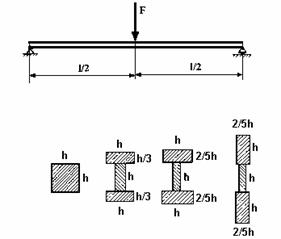
6. ábra. A teherbírás növekedése a keresztmetszet alakjának változtatásakor |
A költségnövekedési törvényszerûségeknek hasonlósági összefüggésekkel való meghatározását elsõsorban hasonló, vagy közel hasonló gyártmánysorozatok esetén célszerû elvégezni . A gyártástechnológiai mûveletek költségbecslése a bér- és anyagköltségek figyelembevételével történik A megfogalmazott szempontok mellett, léteznek olyan konstrukciós megoldások , melyek gazdaságosabb anyagkihasználást tesznek lehetõvé (6. ábra) és így növelhetõ a szerkezet teherbírása. A 6. ábrán látható h x h keresztmetszetû csuklós kéttámaszú tartót középen F erõ terheli. A tartó igénybevétele hajlítás és nyírás (az utóbbit elhanyagoljuk). A hajlításból a tartó közepén, a szélsõ szálban smax=Mh/K feszültség ébred (Mh - a hajlító nyomaték; K - a keresztmetsze- |
ti tényezõ). A tartó anyagának jobb kihasználása érdekében megkívánjuk, hogy a szélsõ szálban a maximális feszültség éppen az anyag megengedett feszültségével (sm) legyen egyenlõ. Ezt az esetet tekintjük kiindulási állapotnak. Amennyiben a keresztmetszet területét változatlannak tekintjük, de az alakját változtatjuk az 5. ábra szerint, akkor a ke-resztmetszeti tényezõ növekszik és ezáltal nõ a teherbírás (2. táblázat).
2. táblázat. A tartó teherbírásának növekedése a keresztmetszet alakjának változtatásakor
|
Keresztmetszet |
Teherbírás növekedés az elsõ változathoz viszonyítva |
|
elsõ |
|
|
második |
|
|
harmadik |
|
|
negyedik |
|
A fentebbi példa mutatja, hogy a mechanikai ismeretekre alapozva el lehet érni az anyag jobb kihasználását és ezáltal gazdaságosabb szerkezetet kapunk. Ha e gondolatmenetet tovább folytatjuk, akkor eljutunk az egyenszilárdságú tartókhoz , melyeket különbözõ terhelések esetén bizonyos értelemben "optimális" alakúra tervezhetünk.
A következõ fejezetrészben áttekintjük, hogy a mûszaki optimálási problémát miként lehet általánosan megfogalmazni.
Minden optimálási feladat megfogalmazásakor el kell dönteni, hogy milyen értékeket tekintünk változóknak (ismeretleneknek). Szerkezetek tervezésekor általában a geometriai méretek lehetnek változók. Például egy tartó méretezésekor legtöbb esetben a keresztmetszet méretei szerepelhetnek ismeretlenként. Bizonyos esetekben változók lehetnek az anyagjellemzõk is.
Technológiai folyamatok, rendszerek optimális méretezésekor ismeretlen lehet a nyomás, a hõmérséklet, az idõ, stb. Az optimális méretezés kezdeti szakaszában arra törekedtek, hogy a problémát minél több változóval írják le. A gyakorlati tapasztalatok azonban azt mutatták, hogy nem szükséges sok változót használni, hanem azokat kell ismeretlenként kezelni, melyekre a probléma leginkább érzékeny. A szakirodalomban közölt publikációkból látható, hogy viszonylag kevés változó esetén is jelentõs súly- ill. költségmegtakarítás érhetõ el
Az optimálás kezdeti szakaszában a szerkezet tömegét vagy térfogatát tekintették célfüggvénynek és ennek minimumát keresték. A gyakorlati eredmények azonban azt mutatták, hogy a minimális tömegû, térfogatú szerkezetek nem a legkisebb költségûek. Az optimális méretezés fejlõdésével párhuzamosan a költségfüggvény került elõtérbe. Elõször az anyagköltség szerepelt célfüggvényként, majd késõbb a gyártási-, üzemeltetési- és egyéb költségeket is beépítették. Elmondható, hogy minél körültekintõbben fogalmazzuk meg a célfüggvényt, a modell annál jobban leírja a valóságot.
Szerkezetoptimálási feladatoknál gyakran a feszültségszintet igyekeztek minimálni és ezt tekintették célfüggvénynek. Ebben az esetben is elmondható, hogy költség szempontjából nem biztos, hogy optimális a szerkezet. A szakirodalomban a célfüggvényre vonatkozóan számos egyéb példát találunk (pl. alakoptimálás), ez amiatt van, hogy gyakran a célfüggvényt a megoldandó feladatokhoz kell igazítani. Vannak olyan feladatok, ahol több célfüggvényt is választhatunk (2.2. fejezet) így eljutunk a több-célfüggvényes optimáláshoz.
A szerkezetektõl, rendszerektõl, stb. megkívánjuk, hogy elégítsenek ki bizonyos követelményeket. E követelményeket az optimálás során korlátozási feltételként fogalmazzuk meg. A korlátozások a feladattól függõen nagyon különbözõek lehetnek, de vannak olyanok, melyek a mûszaki problémák megoldásakor gyakran elõfordulnak. Ilyenek lehetnek a feszültség- ill. alakváltozás korlátozások, melyek lényege a szerkezetben ébredõ feszültségek ill. a létrejött alakváltozások ne haladják meg a megengedett vagy elõírt értéket. A gyártástechnológiából szintén adódhatnak korlátozások, amit ki kell elégíteni. Szerszámgépeknél, rezgésre hajlamos szerkezeteknél fontos, hogy ne jöjjenek létre káros rezgések emiatt rezgéscsillapítás-korlátozást szokás elõírni. Ez különösen a rétegezett (szendvics) szerkezeteknél fordul elõ. Különbözõ rendszereknél, folyamatoknál szükség van a megengedett hõmérséklet, nyomás, hõveszteség, stb. korlátozására, ami szintén korlátozási feltételeket eredményez. A geometriai méreteknek sok esetben egy bizonyos tartományon belül kell elhelyezkedniük, ezért e feltételeket geometriai korlátozásoknak nevezzük.
Az általános áttekintés után az optimális méretezésre különbözõ szakirodalmi ill. saját eredményeket mutatunk be. A bemutatott példákon az optimálás lényegét mutatjuk be, a részletekre nem térünk ki, hanem mindig megadjuk, hogy hol található meg a probléma részletes tárgyalása.
A szerkezetoptimálást az ún. szerkezetszintézist a alapján három fõ szakaszra bonthatjuk.
1. A mérnöki-tervezõi elõkészítõ fázis (analízis):
az anyagok, a szerkezettípus, a gyártástechnológia megválasztása;
a korlátozási (méretezési) feltételek megfogalmazása a kutatási eredmények és elõírások alapján;
a célfüggvény felépítése.
2. Matematikai munkafázis:
a célfüggvény minimumának meghatározása a korlátozási feltételek figyelembevételével.
3. Mérnöki-tervezõi értékelõ, feldolgozó fázis:
érzékenység vizsgálat, méretezési diagramok kidolgozása, beépítés magasabb szintû rendszerekbe.
Az érzékenység vizsgálat azért fontos, mert az optimálás során a kapott eredményeket gyakran kerekíteni kell és emiatt eltérünk az optimális értékektõl. Az érzékenység vizsgálat során meg kell vizsgálni, hogy a célfüggvény minimuma mennyire érzékeny a változók esetleges módosítására.
Az optimális méretezésnek a szerkezettervezésben történõ alkalmazását szemléletesen mutatja be -es könyv.
Az alábbiakban a alapján röviden ismertetjük a meleg közeget szállító csõvezeték optimális szigetelõréteg vastagságának meghatározását. A 7. ábra a csõ falában kialakult hõmérséklet eloszlást mutatja. Optimálás során ismeretlennek tekintjük a szigetelõréteg vastagságát (h2). Az ábrán látható mennyiségek jelentése a következõ: tfl - a meleg közeg hõmérséklete; t1, t2, t3, t4 - a falhõmérséklet értéke a jelölt pontban; tu - a környezeti (levegõ) hõmérséklet; a ill. a - a csõ belsõ falán ill. a szigetelt csõ külsõ felületén értelmezett hõátadási tényezõ; l - a csõfal hõvezetési tényezõje; l - a szigetelõ réteg hõvezetési tényezõje; l - a szigetelést burkoló (alumínium) lemez hõvezetési tényezõje.
A célfüggvény (K) esetünkben az alábbi költségösszetevõket tartalmazza:
a szigetelést borító lemez költségét (Ka)
a lemez vágásának (Kv), peremezésének (Kp) és mivel szegecseléssel kapcsoljuk õket össze, ezért a szegecselés költségét (Ksz) is;
a csõvezeték anyagköltségét (Kcsa);
a csõ tisztításának költségét (Kt);
a csõszakaszok egymáshoz hegesztésének költségét (Kh);
a szigetelõréteg elkészítésének (habosításának) költségét (Khab);
a hõveszteség költségét (Khõ). A szigetelt csõ külsõ felülete és a környezeti (levegõ) hõmérséklete között különbség van, emiatt a környezetbe hõ adódik át. Ez különösen télen jelentõs hõveszteséget okozhat.
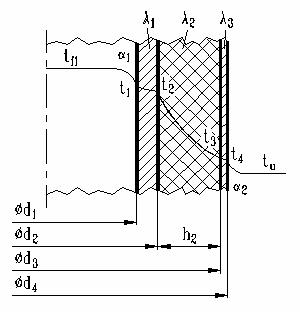
7. ábra. Hõmérséklet-eloszlás a szigetelt csõ falában
A fenti költségösszetevõket figyelembe véve a célfüggvény:
K=Ka+Kv+Kp+Ksz+Kcsa+Kt+Kh+Khab+Khõ.
A korlátozási feltételeket a feladat mûszaki tartalmának megfelelõen az alábbiak szerint fogalmazzuk meg:
a megengedett hõveszteség korlátozása;
a szigetelt csõ külsõ falhõmérsékletének korlátozása.
A megengedett hõveszteség értékét a mûszaki hõtani ismeretek alapján tudjuk számítani. A hõveszteség mértékét azért kell korlátozni, mert ez téli idõszakban, szabad térben üzemelõ csõvezeték esetén tekintélyes lehet. A hõveszteséggel összefüggésben van a külsõ falhõmérséklet, melynek értékét szintén korlátozni kell. A t4 falhõmérséklet nem lehet nagyobb a megengedett tm értéknél.
A 3. táblázat a költségfüggvény minimumát (Kmin), ezen belül egy adott idõszakra vonatkoztatva a hõveszteség költségét (Khõ) és az optimális szigetelõréteg vastagságát (h2) ismerteti, d1=100 mm belsõ átmérõjû és l=500 m hosszú csõvezeték esetén.
3. táblázat. A költségminimum és az optimális szigetelõréteg vastagság változása különbözõ környezeti ill. falhõmérséklet esetén
|
Tu oC |
tmeg oC |
Kmin HUF |
h2 mm |
Khõ HUF |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A környezeti hõmérséklet (tu) és a megengedett külsõ falhõmérséklet (t4) változik.
A -os irodalomban egy kétrétegû hõszigeteléssel ellátott csõvezeték optimális méretezésére találunk példát.
Ismeretes, hogy a tengelyeken levõ hirtelen keresztmetszet változások feszültségkoncentrációt eredményeznek, ami jelentõsen csökkentheti a tengelyek élettartamát. Ugyanakkor az is tény, hogy a kialakult feszültségkoncentrációt beszúrásokkal (tehermentesítõ hornyokkal) csökkenteni lehet (8. ábra). A DIN 471 szerint biztosító gyûrûk (Seger-gyûrûk) alkalmazásakor általában derékszögû-négyszög alakú hornyokat készítenek, melyek jelentõs feszültségszint emelkedést okozhatnak.
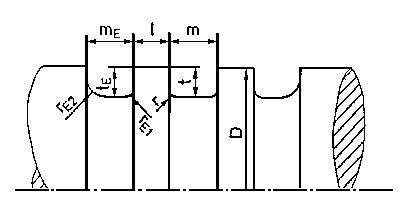
8. ábra. A fõhorony és a tehermentesítõ horony kialakítása
Ebben az esetben felvetõdik a kérdés, hogy a feszültségkoncentrációt milyen geometriai kialakítású horonnyal lehet hatékonyan csökkenteni. E kérdésre a -es irodalomban bemutatott megoldással lehet válaszolni. A feszültségkoncentráció a bruttó alaktényezõvel szoros összefüggésben van.
Esetünkben célfüggvénynek tehát a fõhorony bruttó alaktényezõjét tekintjük és ezt kívánjuk minimális értékre szorítani úgy, hogy ismeretleneknek a fõhorony lekerekítési sugarát (r), valamint a tehermentesítõ horony mélységét (tE) és lekerekítési sugarait (rE1, rE2) tekintjük. A célfüggvény (a bruttó alaktényezõ):
![]() ahol
ca, c0 és c1 állandók.
ahol
ca, c0 és c1 állandók.
A korlátozási feltételek megfogalmazásakor ügyelni kell arra, hogy a baloldali és a jobboldali tehermentesítõ horony (8. ábra) bruttó alaktényezõje ne legyen nagyobb a fõhorony (középsõ) alaktényezõjénél, mert akkor megszûnik a tehermentesítõ hatás. Ennek megfelelõen az alaktényezõre vonatkozó korlátozási feltételek:
akE1£akH
akE2£akH
ahol:
ahol c2, c3 állandók.
A változók értékeire vonatkozó korlátozási feltételek az alábbiak:
r£0,1s,
£rE1£t,
£rE2£t,
£tE£2t,
ahol s a gyûrû vastagsága.
A célfüggvény és a korlátozási feltételek megfogalmazása után konkrét értékekkel megoldottuk az optimálási feladatot.
A horony optimális geometriai méretei: rE1=0,62 mm; rE2=1,25 mm; tE=1,45 mm; r=0,15 mm.
Az optimális kialakítású horonynál végeselemes módszerrel kiszámítottuk a feszültségeket a fõhoronyban (smax,H=236 N/mm2) és a tehermentesítõ horonyban az 1-es és 2-es sugárnál (smax,E1=233 N/mm2; smax,E2=237 N/mm2). Az eredménybõl látható, hogy a maximális feszültségek a fõhoronyban és a tehermentesítõ horonyban szinte megegyeznek, ami gyakorlati szempontból kedvezõ. Az optimálistól eltérõ geometriai kialakítású hornyokat is vizsgáltunk, de a kapott értékek a várakozásnak megfelelõen rosszabbak lettek. A számítási eredményeket a kísérleti vizsgálatok igazolták.
A rácsos szerkezetek optimálására vonatkozóan számos szakirodalmi példát találunk. Az optimálási feladatoknál legtöbbször két eset fordul elõ:
adott a szerkezet geometriai kialakítása és emiatt ismeretlenként a rúdkeresztmetszetek szerepelnek;
a szerkezet geometriai kialakítása nincs mereven lerögzítve, ezért a geometriai kialakítást is optimálni kell.
Célfüggvénynek:
a szerkezet térfogatát (f1(x));
a 2-es csomópont elmozdulását (f2(x)) és
a 3-as csomópont elmozdulását (f3(x)) választjuk.
Mivel három célfüggvénnyel állunk szemben, ezért a feladat a 2.2 fejezet szerint a több célfüggvényes optimálás módszereivel oldható meg. Az egyik megoldási módszer az ún. súlyozásos módszer, melynek lényege, hogy a célfüggvényeket megszorozzuk a súlyozó tényezõvel (wi) majd összeadással egyetlen célfüggvényt állítunk elõ:
![]()
![]() wi³
wi³
Látható, hogy a súlyozó tényezõknek nullánál nagyobbnak kell lenniük, összegük pedig egy.
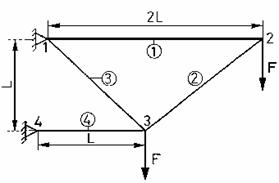
9. ábra. A rácsos tartó felépítése
A 9. ábrán látható tartó geometriai kialakítását adottnak tekintjük és ismeretlennek a négy rúd keresztmetszetét (Ai) választjuk. Ily módon a célfüggvények:
a szerkezet térfogata
![]()
ahol li az egyes rudak hossza;
a 2-es csomópont elmozdulása
f2(x)=u1,
a 3-as csomópont elmozdulása
f3(x)=u2.
A korlátozási feltételek az egyes rudak minimális keresztmetszetére vonatkoznak, vagyis egy minimális értéknél (Aimin) nagyobbnak kell lenniük:
Aimin£Ai, i=1, 2,., 4.
A tartó optimálásához az alábbi értékeket tekintjük állandónak:
F=10 kN; E=210 GPa; L=2 m; Aimin=0,001 m2.
A számítások eredményeit a 4. táblázat foglalja össze.
4. táblázat. A rácsos tartó optimálásának eredményei
|
Súlyozó tényezõk |
Optimális keresztmetszetek |
Minimális térfogat cm3 |
A2-es csomópont elmozdulása mm |
A3-as csomópont elmozdulása mm |
|
w1=0,8 w2=0,1 w3=0,1 |
A1=1,430 A2=0,988 A3=3,728 A4=3,745 |
|
|
|
|
w1=0,10 w2=0,45 w3=0,45 |
A1=2,508 A2=2,300 A3=7,827 A4=7,900 |
|
|
|
A 4. táblázatból látható, hogy ha a szerkezet térfogatát nagyobb súlyozó tényezõvel vesszük figyelembe, akkor az elmozdulások viszonylag nagyok lesznek, a térfogat azonban kicsi. Ha a csomópontok elmozdulását csökkenteni kívánjuk, akkor meg kell növelni a súlyozó tényezõjüket (w2=0,45; w3=0,45). Ebben az esetben egy nagyobb térfogatú, merevebb szerkezetet kapunk. Az eredményekbõl látható, hogy több célfüggvényes optimáláskor vizsgálható az egyes célfüggvények fontossága és ehhez kapcsolódóan az optimális megoldás érzékenysége.
A utóbbi években az optimálás terén elõretört az evolúciós algoritmusok alkalmazása. A módszert nemcsak szerkezetoptimálásra, hanem a legkülönbözõbb típusú feladatok megoldására használják. A -es irodalomban szemléletes példát találunk egy üvegház paramétereinek optimálására. A -es irodalom bemutatja az evolúciós szerkezetoptimálást, majd számos alkalmazást ismertet. A módszer lényege, hogy a szerkezetet végeselemekre bontja, majd a kevésbé igénybe vett elemeket eltávolítja és így valójában egy feszültségre kihasznált konstrukciót kapunk. Az eltávolítás a megadott mértékig folytatódik úgy, hogy a megoldás fokozatosan az optimum felé halad. Az egyes elemekben a redukált feszültségeket a Huber-Mises-Hencky elmélet alapján számítja. A szerkezet optimális alakját az ún. csökkentési arány (RR) szerint számítja:
![]()
|
10. ábra. A tartó alakja optimálás elõtt |
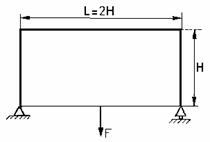
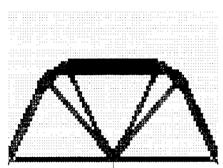
ahol A módszer felhasználásával több rácsos tartót optimáltunk, közülük a 10. ábrán látható tartóra vonatkozó megoldást ismertetjük. Feladatunk, hogy az ábrán látható tartóból kiindulva meghatározzuk az optimális rácsos tartót. A kiindulási állapotban a tartó egy 10 mm vastagságú és H=500 mm méretû tömör lemez. Az optimálást különbözõ terhelõerõk esetén végeztük el és közben vizsgáltuk a feszültségszintet, valamint az eltávolított anyag térfogatának alakulását. Az optimálás eredményeként kapott tartó a 11. ábrán látható. Mivel optimálás során az egyes elemekben a feszültségek értékét is számítja a program, ezért végeredményként a teljes szerkezet feszültségállapota is ismert lesz. Ennek ellenõrzése céljából elkészítettük az optimális tartót és nyúlásméréssel ellenõriztük a számítások helyességét. |
|
11. ábra. Az optimális tartó |
Az optimális méretezés gyakorlati alkalmazására vonatkozóan számos példát találunk a szakirodalomban. Közülük néhány érdekesebb megoldást célszerû megemlíteni. A -as irodalom tárcsafék, hõcserélõ axiális ventilátor optimálását mutatja be. A -ben egyéb alkalmazások mellett ágyúcsõ, a -as cikkben egy villáskulcs alakoptimálását követhetjük nyomon. A példákat tovább lehetne folytatni mivel az optimálás témakörében már nemzetközi konferenciákat rendeznek és folyóiratok jelennek meg. Elmondható, hogy az optimálás ma már a mérnöki gyakorlat részévé vált.
Könyvészet
Rao, S.S.: Optimization theory and applications, Wiley Eastern Limited, New Delhi, 1984.
Belegundu, A.D.-Chandrupatla, T.R.: Optimization concepts and application in engineering, Prentice Hall, Upper Saddle River, 1999.
Washizu, K.: Variational methods in elasticity and plasticity, Pergamon Press, Oxford, 1982.
Dantzig, G.B.: Linear programming and extensions, Princeton University Press, Princeton, NJ,1963.
Kuhn, H.W.-Tucker, A.: Nonlinear programming, Proc. of the Second Berkeley Symposium on Mathematical Statistics and Probability. University of California Press, Berkeley, 1951.
Schmit, L.A.: Structural design by systematic synthesis, Proc. of the Second Conference on Electronic Computation, ASCE, New York, 1960. p.:105-122.
Caroll, C.W.: The created response surface techniques for optimizing nonlinear, restrained systems, Operations Research 9(1961), No.2. p.:169-184.
Fiacco, A.V.-McCormick, G.P.: Nonlinear programming: sequential unconstrained minimization techniques, Wiley, New York, 1968.
Duffin, R.J.-Peterson, E.-Zener,C.: Geometric programming, Wiley, New York, 1967.
Hernandez, S.-El-Sayed, M.-et al.(ed.): Structural optimization. Computer Aided Optimum Design of Structures IV. Computation Mechanics Publications, Southampton, 1995.
Pohlheim, H.: Evolutionäre Algorithmen, Springer-Verlag, Berlin, 1999.
Xie, Y.M.-Steven, G.P.: Evolutionary Structural Optimization, Springer-Verlag, Berlin, 1997.
Ehrenspiel, K.-Kiewert, A.-Lindemann, U.: Kostengünstig Entwickeln und Konstruieren, Springer-Verlag, Berlin, 1978.
Pahl, G.-Beelich,K.H.: Kostenwachstumgesetze nach Ähnlich-keitsbeziehungen für Schweibverbindungen, VDI-Berichte. Nr.457, 1982. p.:129-141.
Glimm, G.: Früherkennung der Entwicklungs- und Konstruktionskosten, VDI-Berichte. Nr.457, 1982. p.:173-193.
Pahl, G.-Beelich, K.H.: Methoden zur Kostenerkennungi Konstruktion 39(1987) No.7, p.:267-274.
Busch, W.: Fünf Jahre Erfahrung mit Relativkosten in der Industrie. VDI-Berichte, Nr.457, 1982. pp.:53-60.
Pacyna, H.-Hillebrand, A.-Rutz, A.: Kostenfrüherkennung für Gubteile, VDI-Berichte, Nr.457, 1982. pp.:103-114.
Pahl, G.-Rieg, F.: Kostenwachstumsgesetze für Baureihen, Carl Hauser Verlag, München, 1984.
Rachor, N.: Kostengünstig gestalten mit Operationselementen und Kostenstrukturen, TH Darmstadt, 1986.
Muttnyánszky Ádám: Szilárdságtan, Mûszaki Könyvkiadó, Budapest, 1981.
Farkas J.-Timár I.: Fémszerkezetek optimális méretezése, BME Továbbképzõ Intézet. Budapest., 1985.
Farkas J.: Optimum design of metal structures, Akadémiai Kiadó, Budapest, 1984.
Jármai K.-Iványi M.: Gazdaságos fémszerkezetek analízise és tervezése, Mûegyetemi Kiadó, Budapest, 2001.
Timár I.-Borbély T.: Optimization of insulated pipelines, Publ.Univ.of Miskolc, Series C. Mechanical Engineering, Vol.47. (1997) pp.:253-258.
Timár I.-Árpád I.: Csõvezetékek hõszigetelésének optimálása, Energiagazdálkodás 27(1986), pp.: 449-459.
Bordás K.-Heinrich, J.-Timár I.: Optimierung von Entlastungskerben an Sicherungsringnuten, Konstruktion 37(1985), pp.:61-65.
Siddal, J.N.: Optimal Engineering design, Marcel Dekker, New York, 1982.
Haug, E.J.-Arora, J.S.: Applied Optimal design, Wiley&Sohns, New York, 1979.
Herskovits, J.-Dias, G.-Santos, G.-et al.: Shape structural optimization with an interior point nonlinear programming algorithmeni Struct. Mulidisc. Optim 20(2000), pp.:107-115.
Találat: 3806